提升人才培养水平:通过建设无人机通信综合实训室和相关课程,提升学校在低空经济通用技术领域的人才培养水平。
产教融合:通过产教融合、项目导向、创新赋能的教育模式,促进本地低空经济产业发展。
科研与社会服务:依托实训室和课程资源,开展行业应用研究,提供技术培训与研发服务,支持无人机通信、卫星导航系统技术、感知技术等前沿领域方向的创新研究,提升学院在行业发展中的服务能力。
建立行业示范基地:通过结合先进的教学方法、行业设备及丰富实践经验,打造新型人才培养模式,建成无人机通信领域的教学示范基地。
行业交流平台:定期开展前沿技术的案例分析、学术交流活动,建立区域内科普、科研、教研一体化的服务平台。

猫头鹰3,实战派。全能旗舰,助力科研成果转化落地,与猫头鹰Mini 3相比,猫头鹰 3体型更大,负载更强,能够搭载更多设备,适用于更多场景。

猫头鹰OWL3无人机是一个安全、可靠、前沿、综合的无人机学习、实验平台,满足多样化的科研需求。集成 iTof、双目视觉、下摄激光、双轴增稳云台和超高清摄像头等多种传感器,能够有效感知规避 5 mm 直径的障碍物,猫头鹰3还是面向科研与产业应用的开源无人机平台,全面支持二次开发,用户可增加其他负载和传感器,用于 GNSS 拒止境下基于视觉的无人机飞行、定位、导航、避障、识别、跟踪等算法学习、实验、开发、验证,以及室内无人机组网编队的开发、实验。云台摄像支持机载高清高画质编码录制,同步支持低延迟视频图像传输功能,能清晰捕捉目标画面并实时传输给地面控制端或其他相关设备。


猫头鹰3,实战派,全能旗舰,助力科研成果转化落地,与OWL mini 3相比,OWL 3 体型更大,负载更强,能够搭载更多设备,更适用于多场景。
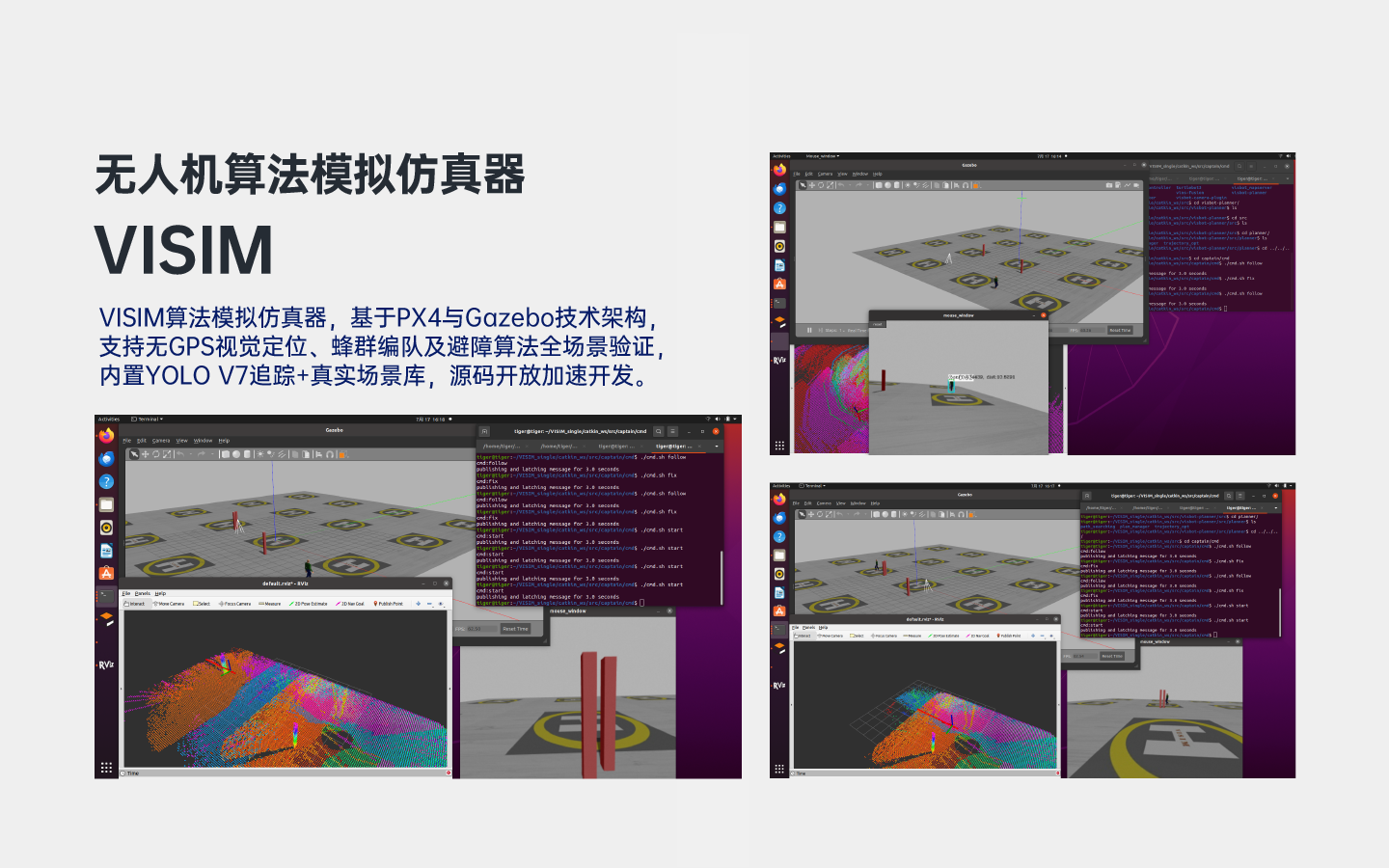
无人机作为空中机器人,在各行各业发挥了重要的作用,无人机的AI赋能和蜂群协同是近年来的研究热点。
高校实验室与科研领域是无人机控制算法与AI赋能的主要研究阵地。面对未来AI时代,控制算法与AI赋能的教学和研发方式被重新定义,行业亟需一种更快速、高效的无人机控制算法研发模式。
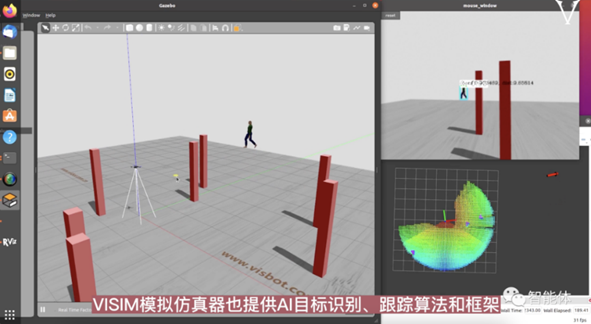
无人机模拟仿真器VISIM可帮助教学及科研工作者在第一时间对算法进行实践验证,提高教学和科研效率,模拟验证后再用真机测试,减少风险和炸机发生概率。
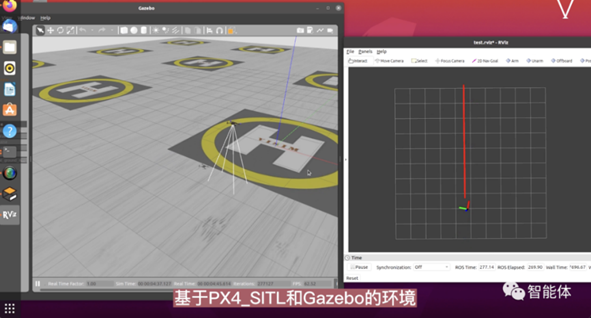
基于PX4_SITL和Gazebo的环境,提供位置、速度、加速度等控制方式,用户可以验证自己的飞控算法和外围控制算法。
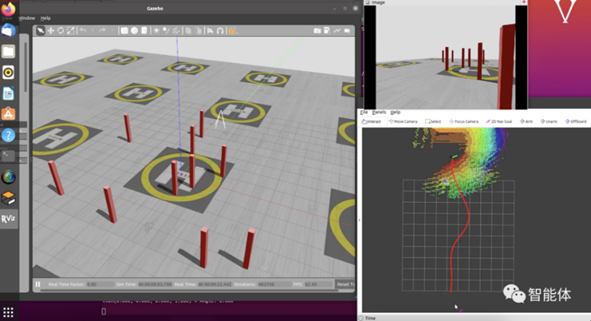
自主飞行和路径规划方面,模拟器适配了Ego-Planner开源算法和一些基本的路径生成算法,方便用户实现轨迹生成算法及轨迹控制验证;
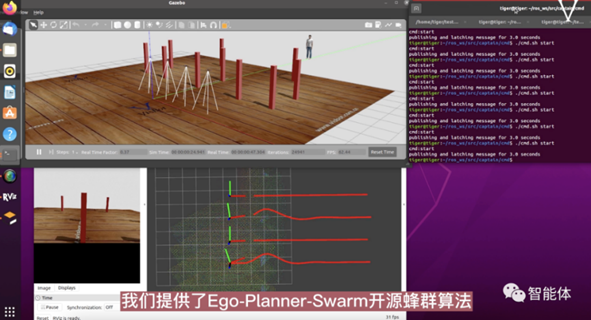
提供Ego-Planner-Swarm开源蜂群算法,用户也可在模拟器中开发/验证自己的集群/蜂群算法;
VSIM模拟仿真器也提供AI目标识别、跟踪算法和框架,方便用户实现无人机对目标的追踪等实验;
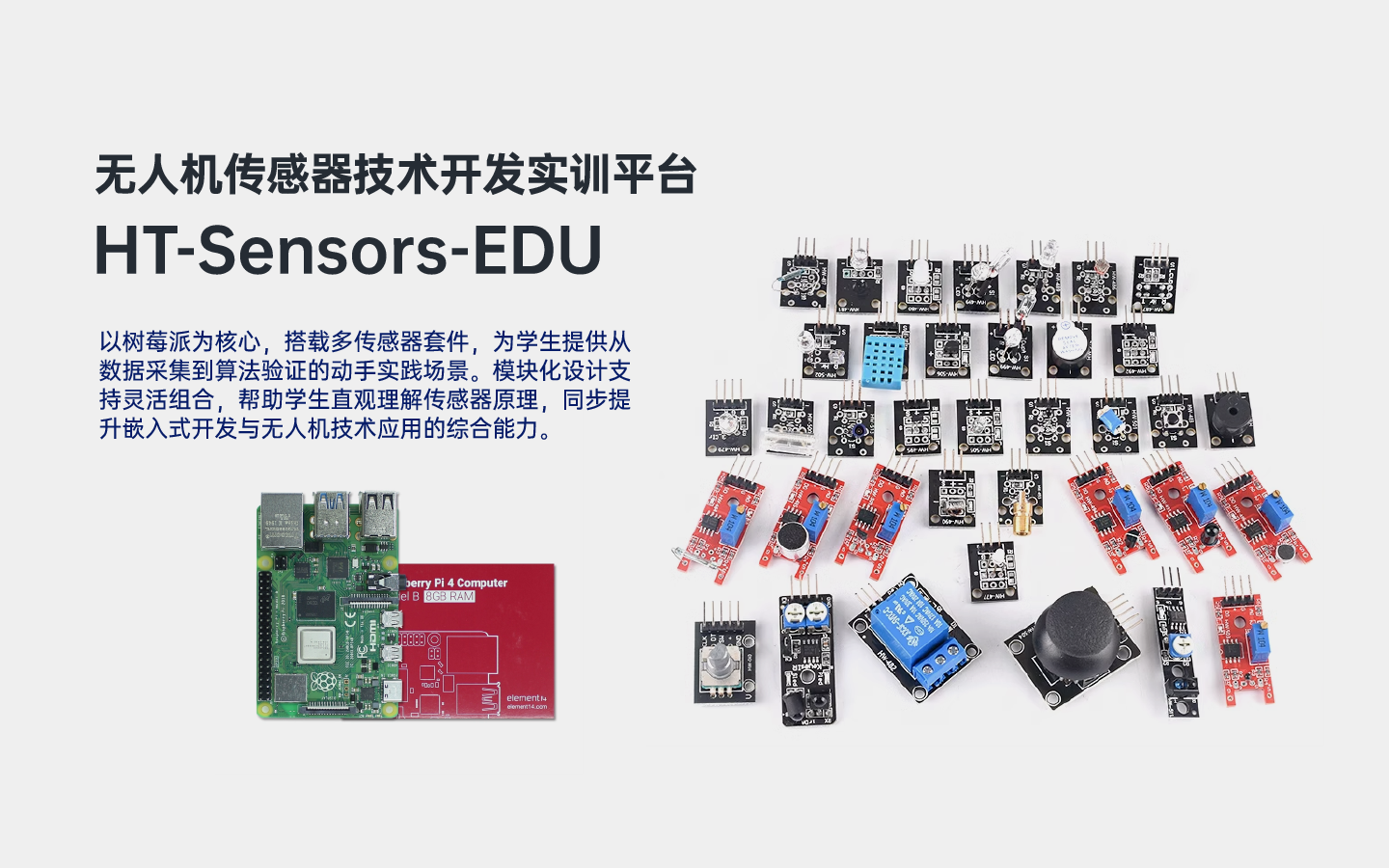
无人机通常采用多种传感器,通过数据融合技术将来自不同传感器的数据整合成更准确的信息。传感器之间的协同工作可以实现无人机的高度自主飞行和复杂任务执行。无人机传感器技术开发实训平台提供多种传感器模块,主要包括惯性导航传感器模块、红外传感器、温湿度传感器、火焰传感器等。传感器模块套件配合单板计算机,实现各种传感器原理、应用、上位机软件编写等实验。
无人机GNSS INS惯性组合导航开发模块可用于学习无人机惯性导航。惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | AI视觉无人机开发平台 | 架 | 10 | 中航恒拓 | OWL 3 |
| 2 | AI视觉无人机开发平台3RTK | 套 | 10 | 中航恒拓 | OWL3RTK |
| 3 | AI视觉无人机耗材包 | 套 | 10 | 中航恒拓 | V-HT-Lib3 |
| 4 | 无人机算法模拟仿真器 | 台 | 9 | 中航恒拓 | VISIM |
| 5 | 无人机传感器技术开发实训平台 | 套 | 25 | 中航恒拓 | HT-Sensors-EDU |
| 6 | 计算机 | 台 | 9 | 主流品牌 | 主流型号 |
| 7 | 桌椅 | 套 | 9 | 中航恒拓 | 主流型号 |