“人工智能+”(Artificial Intelligence Plus,AI+)是指将人工智能技术与各行各业深度融合,推动产业转型升级和创新发展的一种理念与实践。它不仅是将人工智能应用于某一特定领域,而是通过技术的集成与创新,实现对传统行业的全面赋能与重构。机器视觉是人工智能正在快速发展的一个分支,用机器代替人眼来做测量和判断,通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
同时,随着自主协同技术的突破,无人机蜂群正从实验室概念演变为颠覆战争规则的“新锐力量”。它既是对未来“无人化、智能化”战争形态的预演,也是大国博弈中低成本战略威慑的具象化载体,通过数百架廉价无人机的高效协同,既能执行侦察、打击、电磁压制等复合任务,又可消耗敌方昂贵的防空资源。无人机蜂群作为一种新兴的集群智能系统,正逐渐改变着多个领域的运作模式。它由大量低成本、小型化的无人机组成,通过协同合作完成复杂任务,具有极高的灵活性和适应性,展现出巨大的发展潜力和应用价值。
无人机作为空中机器人,在各行各业发挥了重要的作用,无人机的AI赋能和蜂群协同是近年来的研究热点。
高校实验室与科研领域是无人机控制算法与AI赋能的主要研究阵地。面对未来AI时代,控制算法与AI赋能的教学和研发方式被重新定义,行业亟需一种更快速、高效的无人机控制算法研发模式。
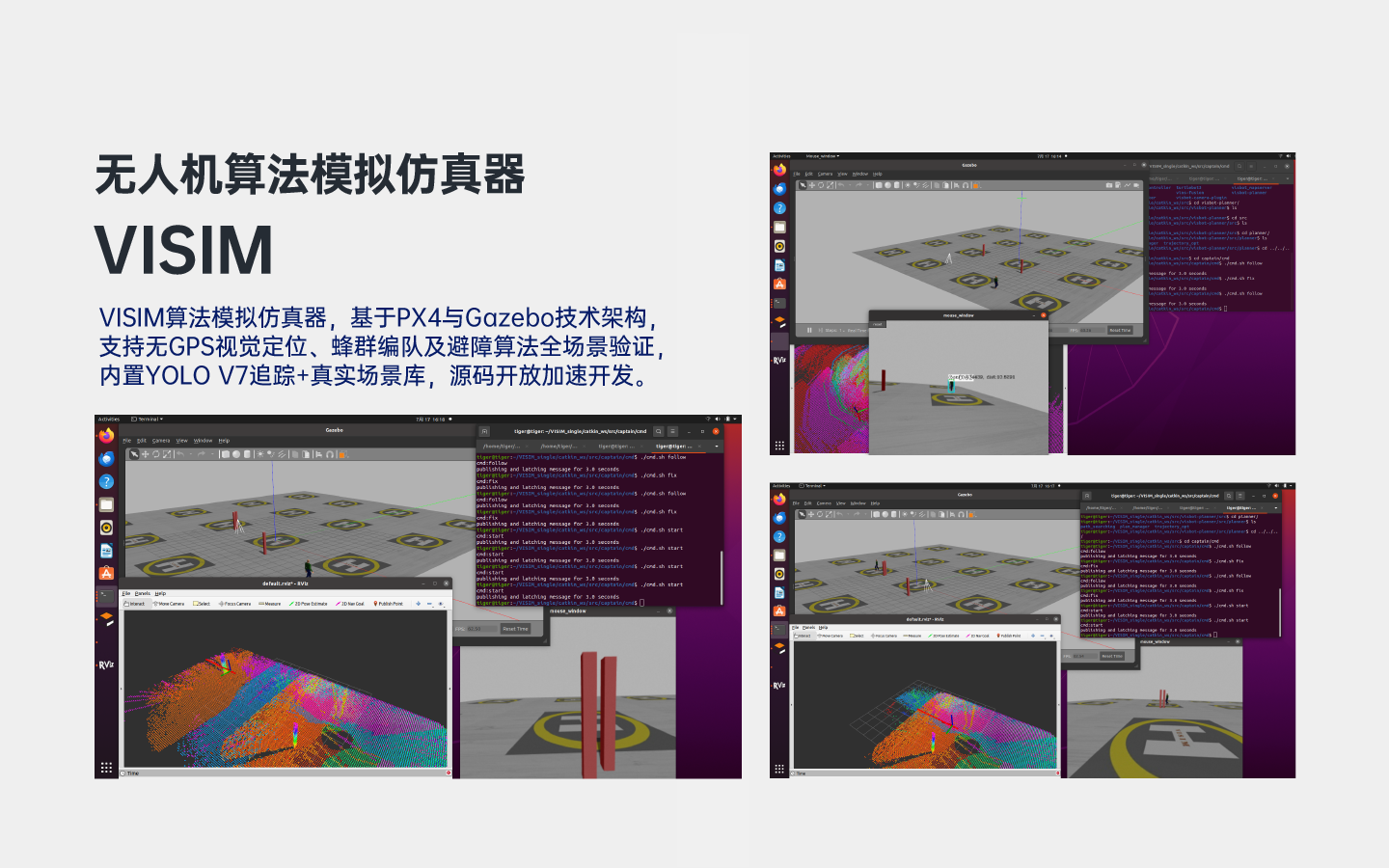
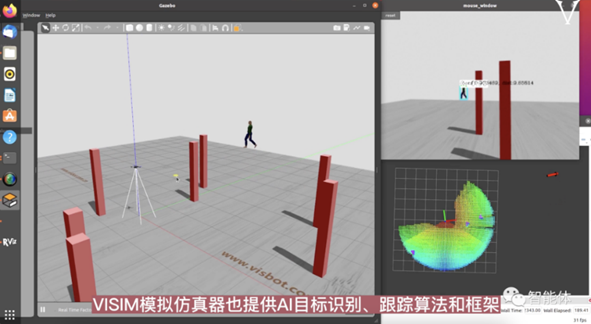
无人机模拟仿真器VISIM可帮助教学及科研工作者在第一时间对算法进行实践验证,提高教学和科研效率,模拟验证后再用真机测试,减少风险和炸机发生概率。
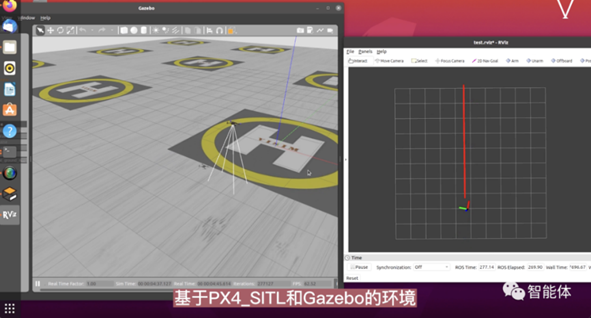
基于PX4_SITL和Gazebo的环境,提供位置、速度、加速度等控制方式,用户可以验证自己的飞控算法和外围控制算法。
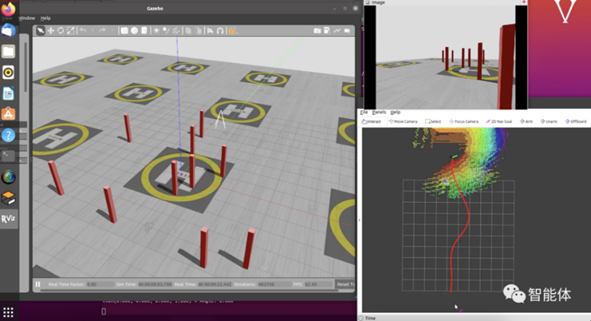
自主飞行和路径规划方面,模拟器适配了Ego-Planner开源算法和一些基本的路径生成算法,方便用户实现轨迹生成算法及轨迹控制验证;
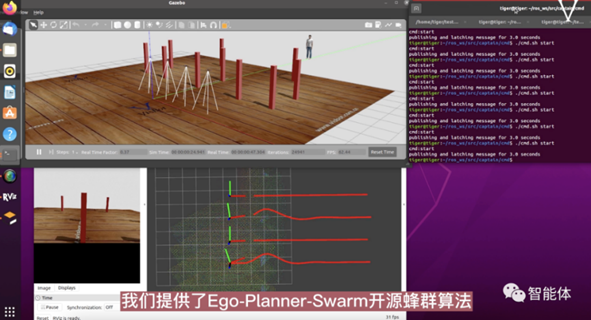
提供Ego-Planner-Swarm开源蜂群算法,用户也可在模拟器中开发/验证自己的集群/蜂群算法;
VSIM模拟仿真器也提供AI目标识别、跟踪算法和框架,方便用户实现无人机对目标的追踪等实验;

无人机执照考证仿真系统通过在计算机上安装模拟软件并搭配专用遥控器,能够高度还原真实场景下的无人机操作。该系统突破了真实飞行在时空、成本与安全方面的限制,为无人机操作学习、技能提升与技术验证提供了一套高效、安全的实践解决方案。

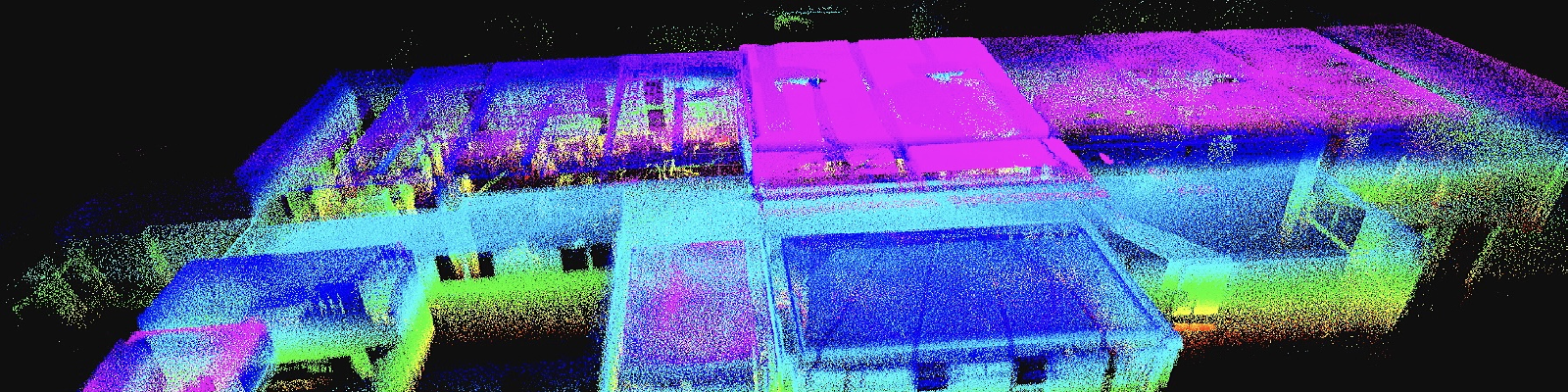
激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL mini3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

多旋翼无人机原理示教平台面板集成飞控、飞控减震球、四路电机、四路电调、机架、分电板、电池、遥控器、接收机等部件,能够展示无人机部件和构成、基本原理、相关部件关系等,可用于无人机结构原理认知、无人机飞控系统调试、动力系统调试、载荷拓展模块设计开发调试等,还可以学习遥控系统、演示机械爪、图传与显示屏、反无人机系统的构造与工作原理,整体结构便于教学使用,可接入220V电源,通电后即可正常演示所有功能,机柜底部带4个万向轮方便移动。

猫头鹰3,实战派。全能旗舰,助力科研成果转化落地,与猫头鹰Mini 3相比,猫头鹰 3体型更大,负载更强,能够搭载更多设备,适用于更多场景。


OWL 3L搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。
激光雷达定位基于LiDAR激光传感器获得的点云数据,融合惯性导航模块的6轴数据,实现LIO算法。
视觉定位基于双目视觉传感器捕获的双目图像,融合惯性导航模块数据,实现VIO算法。
可基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。
支持基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能够提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,激光雷达传感器受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

无人机综合调试与检测实训系统整机功能丰富,既可满足课程教学使用,还可以满足竞赛、研究等需求,可做到一机多用。系统集成了无人机地面站系统、高精度示波器、万用表等多种部件,可满足无人机调试、信号波形查看、各传感器数据查看等需求,还能够满足无人机调试与试飞、不同飞行模式飞行体验等需求,拥有无人机升降平台,能够确保试飞过程中的安全,满足新机组装后验证、维修零件后验证、PID参数调节、抗风性能测试,还能够通过集成的拉力传感器、振动传感器实现零部件疲劳测试、整机及单电机拉力测试、结构震动测试等功能。

无人机零部件维修测试平台主要面向无人机调试与综合应用维修测试实训工作,通过该维修测试平台,学生能够掌握无人机常见故障维修及综合测试应用。
平台构造合理,操作便捷,功能丰富,采用一体集成式设计,配备防静电实验操作台,集成波形采集模块,波形发生器,数字万用表,可编程直流电源,可编程直流电子负载等设备,可用于无人机调试与综合应用维修测试实训、无人机常见故障维修及综合测试应用,能够进行无人机电机、控制机构、信号传输、遥控器等部分测试并可对控制程序进行综合编程练习,还可以用于无人机软件调试、参数设置、地面站及应用程序开发等。

无人机故障检修实训平台功能全面,涵盖了硬件配置、飞行模式、传感器集成、功能扩展、实训平台结构、安全设计、故障设置与检测以及故障检测与维修等多个方面,能够为学生提供丰富的实训内容和良好的学习体验,有助于培养学生的无人机故障检测与维修能力。
该平台能够还原四旋翼无人机系统构成,直观展示无人机内部线路的连接方式,帮助学生深入了解无人机的硬件结构和电气连接。支持多种无人机故障情景,包括动力电源故障、分电板故障、电机供电故障、电机信号故障、接收机故障、飞控供电故障、电机转向故障等,接头采用插拔接口设计,可同时设置多种不同的无人机故障情景,设置的故障可通过插拔接口或者开关进行恢复复原,方便学生进行故障模拟和维修练习。
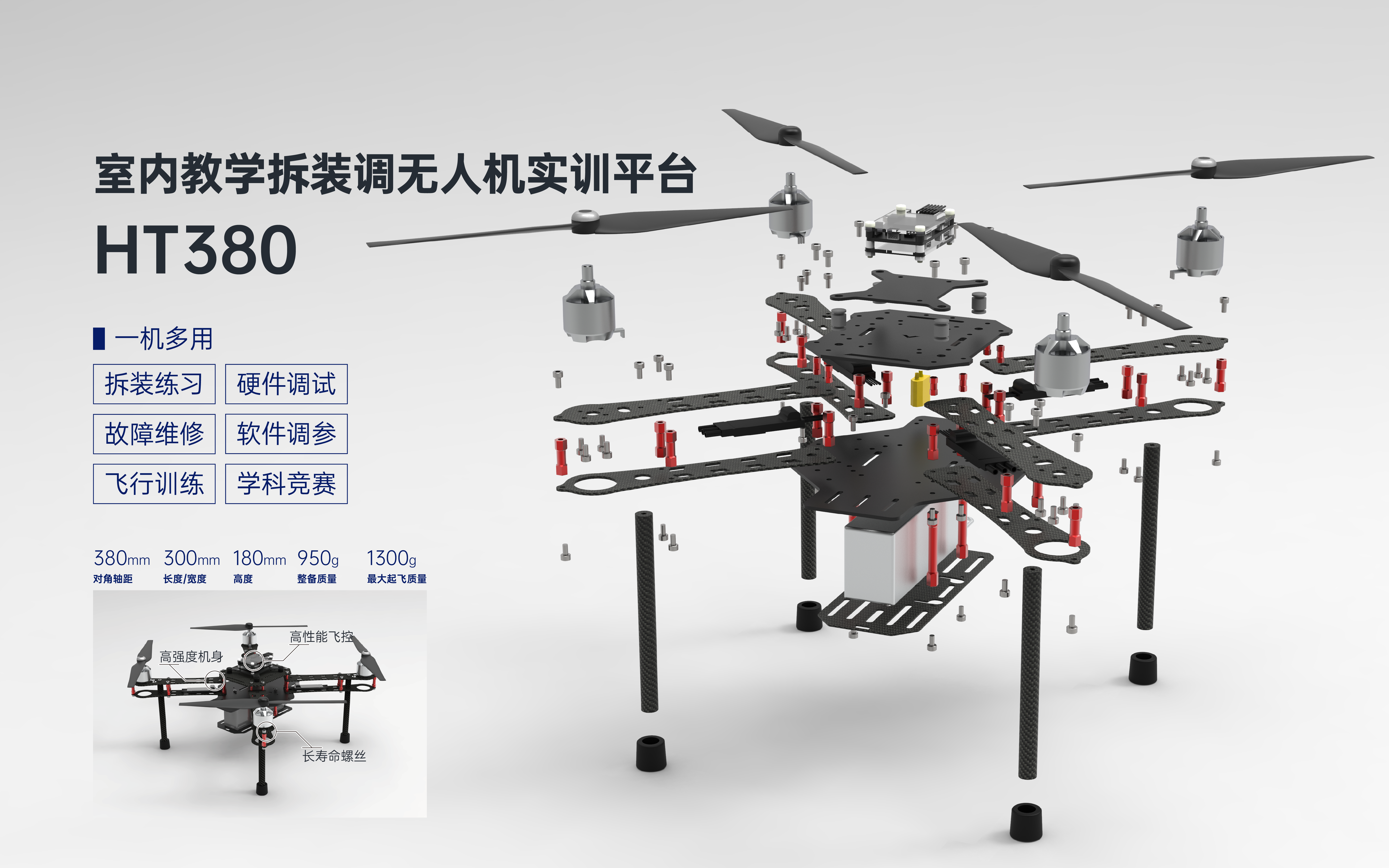
室内教学拆装调无人机实训平台HT380是一款专为教学而生的无人机实训平台,外观设计精美,机身采用高强度碳纤维和航空铝材质,配以M3内六角碳钢螺丝,牢固可靠,不易损坏,寿命长,可用于反复拆装,能够清晰展示无人机各零部件外观,使学生了解无人机基本构造与原理。配套多自由度桌面调试系统,无人机可通过快拆接口连接到调试器,配套专业遥控器,学生可在室内桌面上进行飞行调试,调参,避免炸机。
提供完备的使用说明书、拆装调试手册、全系列视频教程等学习资料,不仅可进行无人机相关教学以及零部件调试、故障检测维修、地面站调试与设置等学习,还可以用于学科竞赛、二次开发和改装。
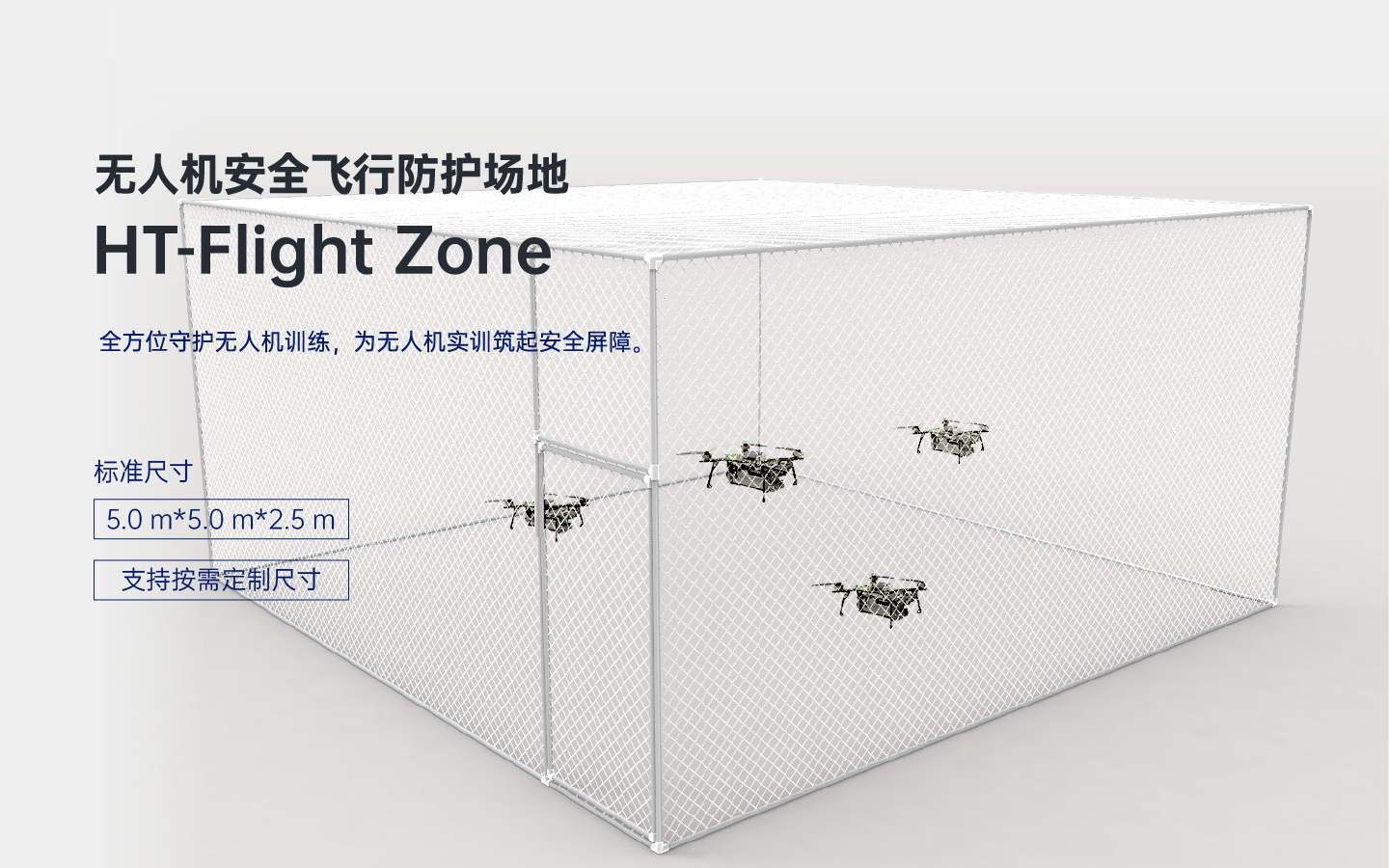
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。

这款无人机电池安全防爆柜采用全钢四层结构,内部尺寸为长 510mm、宽 380mm、高 1500mm,可分层存放无人机电池。其核心功能是通过坚固的全钢材质和多层设计,为电池提供安全储存空间,有效隔离和防范电池可能发生的爆炸、起火等风险,保障电池存放过程中的安全性。

无人机智能电池管理系统采用集成式手提航空箱设计,面板包含4路充电组接口,每组包含2-6S充电接口,最多可同时充放 4路2-6S锂聚合物电池。
支持多种安全保护设计,电源输入反接、欠压、过压保护和输出充电反接保护。
实时显示充电状态、每片电池的充电电流、电池电压和充电电量,对电池状态情况一目了然。
可选工作模式,支持轮流充电、同时充电、放电、电压检测;拥有极高的平衡效率,即使不平衡的电池组,在1C充电条件下,充电时间亦不到1小时。
系统功率低,效率高,自身功耗不超过1W,拥有极高的电能使用效率,充电时充电器不发热。
支持电池分析功能,可查看每片电池的起始电压,充电容量,停止电压。

无人机装调飞测一体化实训操作平台采用高强度钣金一体化成型,提供具有安全防护的飞行调试区域,配备无人机起降环,采用高强度纤维材料,能够与室内教学拆装调无人机实训平台搭配,在保证安全的前提下测试和观察组装或维修后的无人机飞行状态,降低无人机调试时的风险。面板集成数显拉力测量模块,可测量整机升力,测量范围为≥0~5kg。
平台提供控制终端和配套的地面站软件,可满足无人机原理学习、组装维护、综合调试、软件参数设置等需求,可供无人机组装与调试、无人机维护修理等课程使用,还可以满足无人机地面站相关课程学习使用,实现一机多用。
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。
这款无人机电池安全防爆柜采用全钢四层结构,内部尺寸为长 510mm、宽 380mm、高 1500mm,可分层存放无人机电池。其核心功能是通过坚固的全钢材质和多层设计,为电池提供安全储存空间,有效隔离和防范电池可能发生的爆炸、起火等风险,保障电池存放过程中的安全性。
激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL mini3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | 无人机算法模拟仿真器 | 台 | 5 | 中航恒拓 | VISIM |
| 2 | 无人机执照考证仿真系统 | 套 | 31 | 中航恒拓 | SM-KZ |
| 3 | AI视觉无人机开发平台(激光雷达版) | 架 | 5 | 中航恒拓 | OWL Mini 3L |
| 4 | 多旋翼无人机原理示教平台 | 台 | 1 | 中航恒拓 | YL100 |
| 5 | AI视觉无人机开发平台(激光雷达版) | 架 | 5 | 中航恒拓 | OWL 3L |
| 6 | 无人机综合调试与检测实训平台 | 台 | 1 | 中航恒拓 | TS100 |
| 7 | 无人机蜂群控制平台 | 套 | 1 | 中航恒拓 | V-PC |
| 8 | 无人机零部件维修测试实训平台 | 套 | 1 | 中航恒拓 | WX100 |
| 9 | AI视觉无人机耗材包 | 套 | 5 | 中航恒拓 | V-HT-Lib3 |
| 10 | 无人机故障检修实训平台 | 套 | 31 | 中航恒拓 | GZ100 |
| 11 | AI视觉无人机耗材包 | 套 | 5 | 中航恒拓 | V-HT-Libmini3 |
| 12 | 室内教学拆装调无人机实训平台 | 架 | 31 | 中航恒拓 | HT380 |
| 13 | 无人机安全飞行防护场地 | 套 | 1 | 中航恒拓 | HT-Flight Zone |
| 14 | 无人机组装维修工具套件 | 套 | 31 | 中航恒拓 | HT-Tools |
| 15 | 无人机电池安全防爆柜 | 台 | 1 | 中航恒拓 | FB150 |
| 16 | 无人机拆装耗材套装 | 套 | 31 | 中航恒拓 | HT-Lib380 |
| 17 | 无人机智能电池管理系统 | 台 | 5 | 中航恒拓 | HT-Charger |
| 18 | 无人机装调飞测一体化实训操作平台 | 台 | 31 | 中航恒拓 | ZT100 |
| 19 | 拆装调无人机实训平台备用电池 | 块 | 31 | 中航恒拓 | 5200mAh |
| 20 | 多隔板密码储物柜 | 套 | 2 | 中航恒拓 | SG-04C |
| 21 | 钢制多层设备存放架 | 套 | 2 | 中航恒拓 | SJ-4 |
| 22 | 无人机安全飞行防护场地 | 套 | 1 | 中航恒拓 | HT-Flight Zone |
| 23 | 无人机场地飞行道具 | 套 | 1 | 中航恒拓 | HT-FLYP |
| 24 | 无人机电池安全防爆柜 | 台 | 2 | 中航恒拓 | FB150 |
| 25 | AI视觉无人机开发平台(激光雷达版) | 架 | 1 | 中航恒拓 | OWL Mini 3L |