空地协同实验室聚焦空地协同领域的技术教学与实训,覆盖从单一设备开发到多智能体协同作业的全流程训练,为学习者提供无人机飞控开发、AI 视觉感知、无人车运动规划以及空地设备间任务调度、数据交互等多维度实践场景,助力其掌握群智感知、协同规划等空地协同核心技术,是培养具备空地协同系统开发与应用能力专业人才的重要载体。

本平台专为院校无人机航拍与开发教学打造,采用碳纤维可折叠四旋翼机身,内置GPS高精度定位模块,兼顾便携与稳定性。搭载STM32全开源飞控(C++编写,支持二次开发),通过配套地面站可完成PID调参、传感器校准、航线规划等实训。配备三轴云台4K相机(1/1.7英寸索尼CMOS,320°航向轴)及高通八核图传遥控器(5.5英寸1080P高亮屏,15km双路数字图传),支持超高清航拍与第一视角任务飞行。提供纸质实训手册、飞控开发教程及11节视频课程,覆盖地面站操作、代码编译等环节,是飞行控制与航拍应用一体化教学的理想平台。

激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL mini3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

基于ROS操作系统开发的智能视觉搬运机器人,以树莓派4B为主控,采用Python编程,在视觉机械臂的基础上,增加了一个可以全向移动的麦克纳姆轮底盘,使得机器人可以进行移动抓取、目标追踪、智能搬运等功能,底盘可以自由拆卸,既可以作为桌面视觉机械臂使用,也可以作为移动视觉机械臂使用,提供源代码及两百多节课程资料,帮助用户更好的学习相关知识。能够与无人机配合实现空地协同。

在搭载负载的情况下,前飞续航可达59分钟,悬停状态下也可维持53分钟,支持25米/秒高速避障功能,适用于消防、搜救等需要长时间作业的场景。此外,其全向避障系统结合环扫激光雷达、毫米波雷达及全彩低光鱼眼视觉传感器,可精准识别细小障碍物,并能在夜间穿透雨雾作业,在复杂环境中实现安全返航。图传系统方面,采用O4图传行业增强版,最大传输距离达40公里。十天线结构搭配中继模块设计,可在山区等信号遮挡环境下有效扩展作业范围。
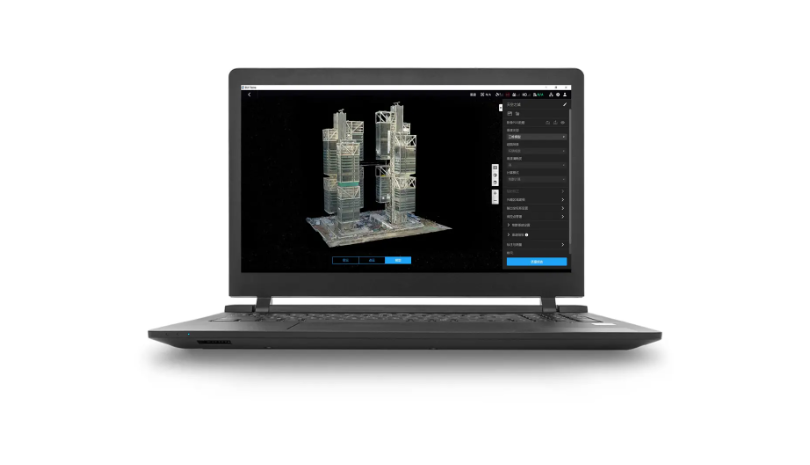
支持无人机航拍影像处理,实现二维正射影像与三维模型快速生成,具备激光雷达点云融合、多光谱分析等高级功能,并可输出多种专业格式数据,助力测绘、建筑、农业等行业高效作业。
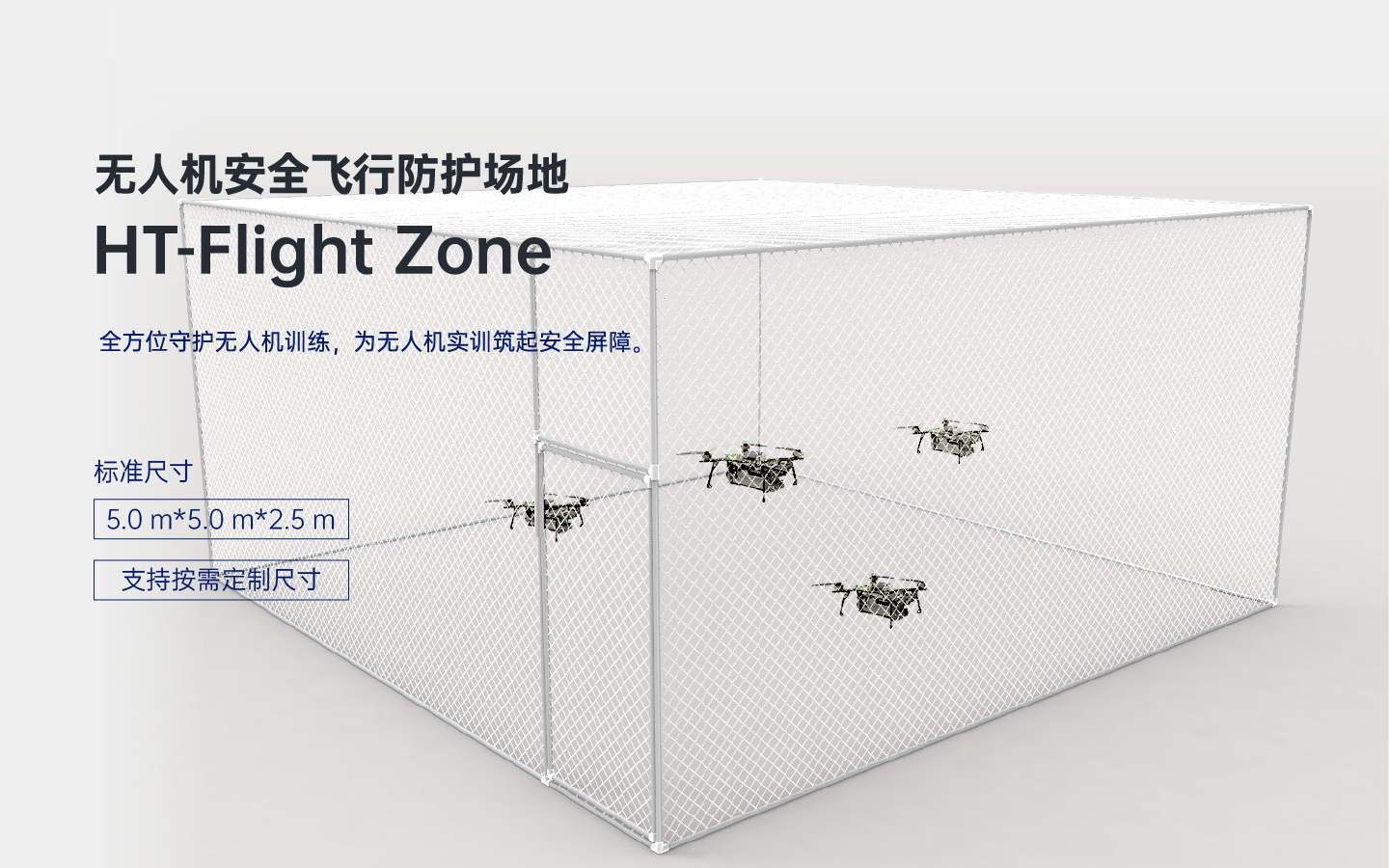
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | 多旋翼航拍教学无人机开发平台 | 架 | 10 | 中航恒拓 | HT500HP |
| 2 | AI视觉无人机开发平台(激光雷达版) | 架 | 10 | 中航恒拓 | OWL Mini 3L |
| 3 | 无人车开发平台 | 套 | 10 | 中航恒拓 | HT-CAR |
| 4 | 空地协同系统软件包 | 套 | 1 | 中航恒拓 | ASCS |
| 5 | 多旋翼专业测绘无人机 | 架 | 1 | DJI | Matrice 400 |
| 6 | 大疆制图软件 | 套 | 1 | DJI | Terra |
| 7 | 计算机 | 台 | 18 | 主流品牌 | 主流型号 |
| 8 | 六边形桌椅组合 | 套 | 9 | 中航恒拓 | LT-6 |
| 9 | 无人机安全飞行防护场地 | 套 | 1 | 中航恒拓 | HT-Flight Zone |