实验室或功能区
无人机仿真、组装、调试与维护一体实训室 - 方案文档
无人机仿真、组装、调试与维护一体实训室
无人机模拟仿真、组装、调试与维护一体实训室是一个专为无人机应用技术专业设计的综合性实训平台,
集成了先进的无人机模拟飞行软件和硬件设备。该实训室的主要功能包括为相关课程提供教学与实训支持,通
过高度仿真的飞行环境帮助学生掌握无人机操作技能;进行模拟飞行训练,提升学生的飞行技能水平和应急处
理能力;模拟无人机在应急救援等场景中的应用,增强学生的实践经验和应对复杂情况的能力;同时实训室配
备了各种无人机型号及其零部件、专业的装配工具、调试设备和测试仪器,旨在为学生提供一个真实的无人机
装调工作环境。其主要功能包括:支持无人机结构与系统、无人机维护技术等课程的教学与实训,使学生掌握
无人机的构造原理、装配流程、调试技巧和维修方法;提供无人机装调实训平台,让学生亲手进行无人机的组
装、调试和测试,积累实践经验;同时,实训室还承担无人机故障排查与维修的教学任务,帮助学生提升解决
无人机实际问题的能力。通过无人机装调实训室的学习与训练,学生能够全面掌握无人机的装调技能,为未来
的无人机应用与维护工作打下坚实的基础。
主要功能
实训室注重理论与实践的结合,通过多媒体工具进行理论讲解,并结合模拟仿真系统进行实践操作,实 现
个性化学习和自主训练,通过无人机装调实训室的学习与训练,学生能够全面掌握无人机的装调技能,为未 来
的无人机应用与维护工作打下坚实的基础。
训练无人机操作技能
通过训练,使学生能够熟练掌握无人机的起飞、降落、悬停、飞行、遥控操作等基本技能,确保在实际应用中能够灵活应对各种飞行任务。
培养应急处理能力
针对无人机可能遇到的失控、遇到障碍物、通信中断等紧急情况,进行专门的应急处理训练,提高学生在紧急情况下的应变能力和快速响应能力。
强化安全操作技能
强调安全意识和安全操作规程的重要性,确保学生在操作过程中严格遵守安全规定,保障自身和设备的安全。
无人机算法仿真
在计算机上模拟无人机在实际场景中的行为和传感器反应,提供机上各种传感器(如深度相机)数据,包括位置坐标、点云、深度图等,可在计算机中模拟无人机与人工智能算法,避免因程序设计不当造成无人机损坏或造成人员受伤。
嵌入式系统与自动控制开发
通过嵌入式及无人机案例实验箱,可实现嵌入式系统课程、嵌入式传感器、自动控制、无人机飞控开发等方向的实验教学。
无人机故障检修
无人机零部件维修测试平台主要面向无人机应用技术专业开展无人机调试与综合应用维修测试实训工作,通过该维修测试平台学生能够掌握无人机常见故障维修及综合测试应用
了解和掌握蜂群协同定位和协同控制
支持多无人机之间的协同定位,使蜂群在飞行过程中能够准确知晓彼此位置,为蜂群的协同飞行、编队等功能提供基础。可实现无人机之间的机间两两通信,任意一架无人机均可获取其他无人机的信息以及控制其他无人机飞行,从而实现蜂群的协同飞行、编队变换等复杂功能,以完成各种任务。
无人机拆装与维护
能够使学生了解无人机基本构造与原理,掌握无人机组装维护、维修保养等相关理论知识与实操能力。
主要实验装备
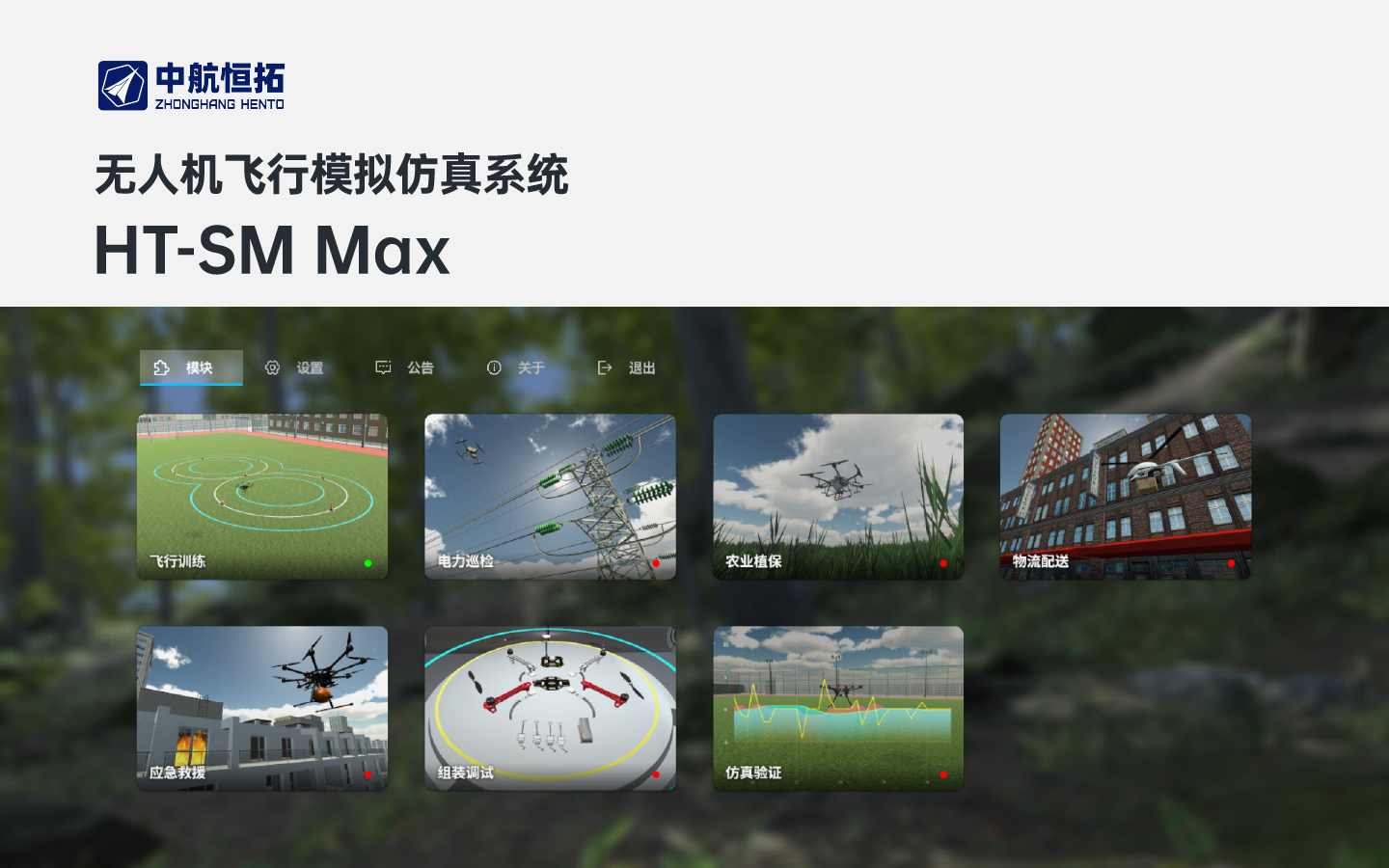
无人机飞行模拟仿真系统
无人机模拟飞行仿真系统通过在计算机安装的模拟软件,配合配套的遥控器,可模拟真实场景下无人机操作。系统共有6个应用场景,包含CAAC考证培训模拟训练飞行、电力巡检、农业植保、应急救援、物流配送、组装调试6个子模块,每个场景都有配套视频教程,可以完成无人机模拟飞行操控技能训练、行业应用飞行操作训练、无人机组装调试训练、农业植保飞行训练、无人机飞行技术等课程初学训练,减少直接使用真机造成的风险,降低初学者心理负担,提高训练速度。
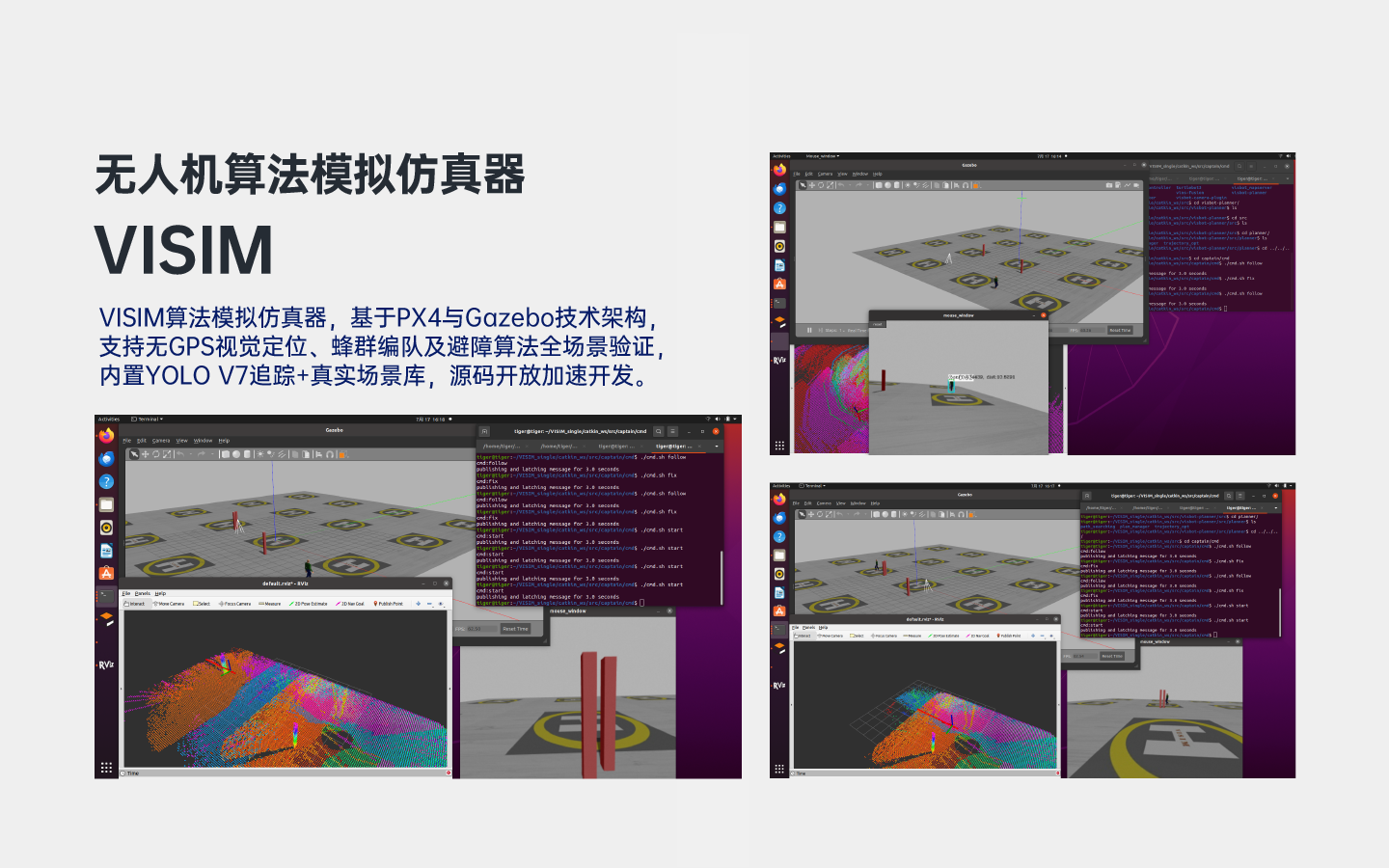
无人机算法模拟仿真器
无人机作为空中机器人,在各行各业发挥了重要的作用,无人机的AI赋能和蜂群协同是近年来的研究热点。
高校实验室与科研领域是无人机控制算法与AI赋能的主要研究阵地。面对未来AI时代,控制算法与AI赋能的教学和研发方式被重新定义,行业亟需一种更快速、高效的无人机控制算法研发模式。
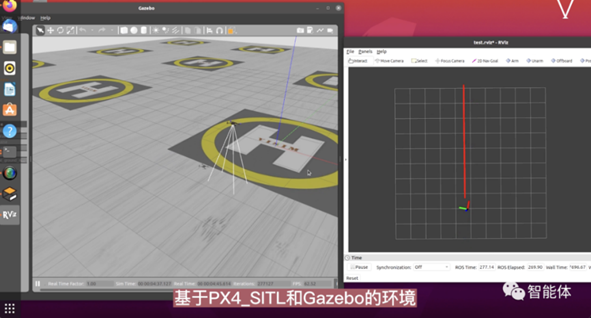
无人机模拟仿真器VISIM可帮助教学及科研工作者在第一时间对算法进行实践验证,提高教学和科研效率,模拟验证后再用真机测试,减少风险和炸机发生概率。
基于PX4_SITL和Gazebo的环境,提供位置、速度、加速度等控制方式,用户可以验证自己的飞控算法和外围控制算法。
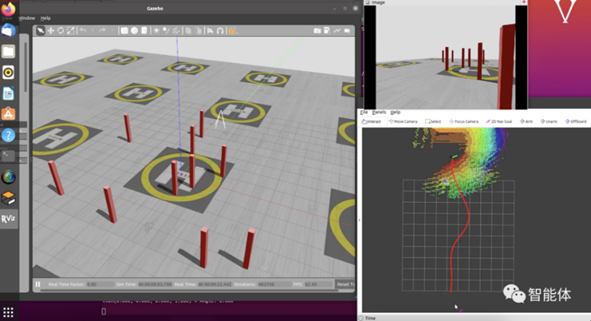
自主飞行和路径规划方面,模拟器适配了Ego-Planner开源算法和一些基本的路径生成算法,方便用户实现轨迹生成算法及轨迹控制验证;
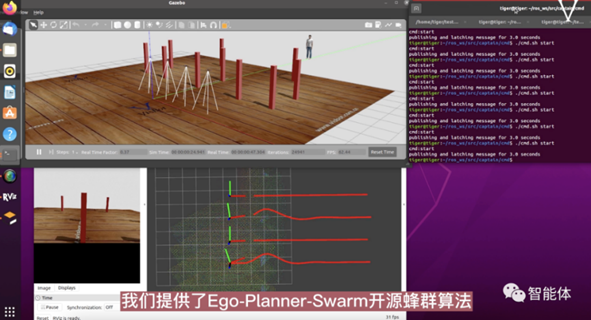
提供Ego-Planner-Swarm开源蜂群算法,用户也可在模拟器中开发/验证自己的集群/蜂群算法;
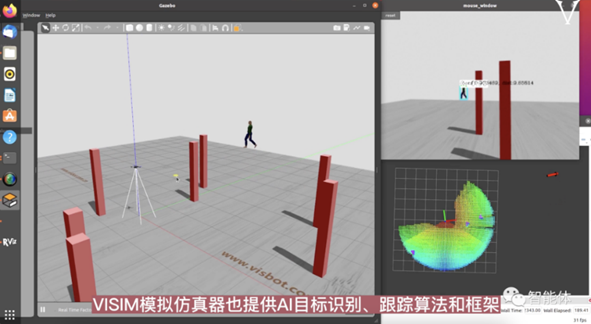
VSIM模拟仿真器也提供AI目标识别、跟踪算法和框架,方便用户实现无人机对目标的追踪等实验;
多旋翼无人机原理示教平台
多旋翼无人机原理示教平台面板集成飞控、飞控减震球、四路电机、四路电调、机架、分电板、电池、遥控器、接收机等部件,能够展示无人机部件和构成、基本原理、相关部件关系等,可用于无人机结构原理认知、无人机飞控系统调试、动力系统调试、载荷拓展模块设计开发调试等,还可以学习遥控系统、演示机械爪、图传与显示屏、反无人机系统的构造与工作原理,整体结构便于教学使用,可接入220V电源,通电后即可正常演示所有功能,机柜底部带4个万向轮方便移动。
嵌入式及无人机案例实验箱
嵌入式及无人机案例实验箱不仅可以满足传统的嵌入式及STM32相关课程的教学实验需求,还为课程设计提供了丰富的无人机飞控工程案例化实验。
该实验箱由四大部分组成,分别为STM32嵌入式实验板卡、平面对轴平衡调试平台、遥控控制器及配件、四轴飞行器。
通过嵌入式及无人机案例实验箱,可实现嵌入式系统课程、嵌入式传感器、自动控制、无人机飞控开发等方向的实验教学。嵌入式实验板卡的处理器采用STM32F407,可以实现丰富的嵌入式硬件外设实验,还可与平面对轴平衡调试平台配合完成对轴控制实验,实现无人机的飞控开发入门学习。
无人机零部件维修测试实训平台
无人机零部件维修测试平台主要面向无人机调试与综合应用维修测试实训工作,通过该维修测试平台,学生能够掌握无人机常见故障维修及综合测试应用。
平台构造合理,操作便捷,功能丰富,采用一体集成式设计,配备防静电实验操作台,集成波形采集模块,波形发生器,数字万用表,可编程直流电源,可编程直流电子负载等设备,可用于无人机调试与综合应用维修测试实训、无人机常见故障维修及综合测试应用,能够进行无人机电机、控制机构、信号传输、遥控器等部分测试并可对控制程序进行综合编程练习,还可以用于无人机软件调试、参数设置、地面站及应用程序开发等。
AI视觉无人机蜂群开发平台(激光雷达版)

猫头鹰3,实战派,全能旗舰,助力科研成果转化落地,与OWL mini 3相比,OWL 3 体型更大,负载更强,能够搭载更多设备,更适用于多场景。


蜂群控制系统主要模块包括飞控模块,定位模块,避障模块,captain,双目驱动,云台驱动,这些模块对内对外统一使用ROS1接口。其中,飞控模块运行基于PX4开源固件自主修改版本,其主要接口和框架兼容PX4规范。自主研发的双目驱动模块, 提供硬件时钟同步的双目数据及生成的深度图。无人机定位系统包括基于视觉的VIO,IMU等传感器数据融合,融合工作由飞控模块完成,定位模块在机载电脑上实现的视觉VIO。避障模块在避障功能打开的环境下,提供到单一或者连续目标点避障路径。为适应不同飞行任务需求,控制机载电脑上各个算法模块,Captain提供了一个统一控制点和任务管理器,方便实现不同的飞行任务。ROS1接口的云台驱动模块,提供云台姿态数据,提供云台控制接口,提供视频图像用于第三方软件实施跟踪。
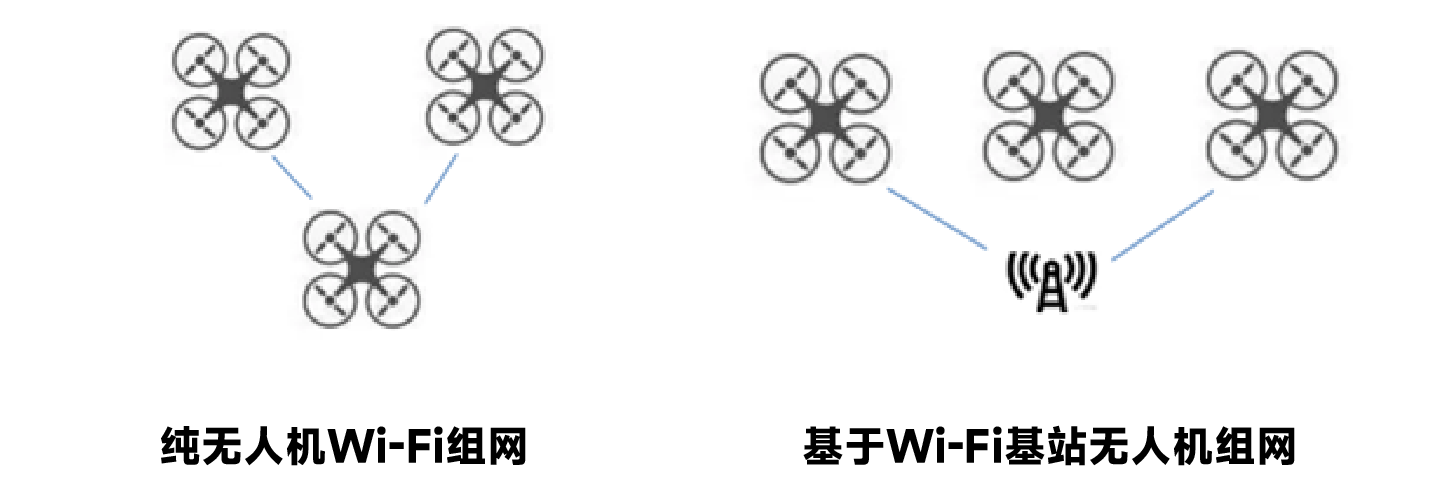
蜂群软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。适配了Ego-Planner-Swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合控制软件就可以同步控制集群进行目标飞行。在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的Ego-Planner-Swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。Visbot视觉模块提供了Wifi接口,可接入大功率Wi-Fi基站,优势是可以较长距离通讯;也可以配置成自组网模式, 省去Wi-Fi基站,可以满足小范围的机群需求。
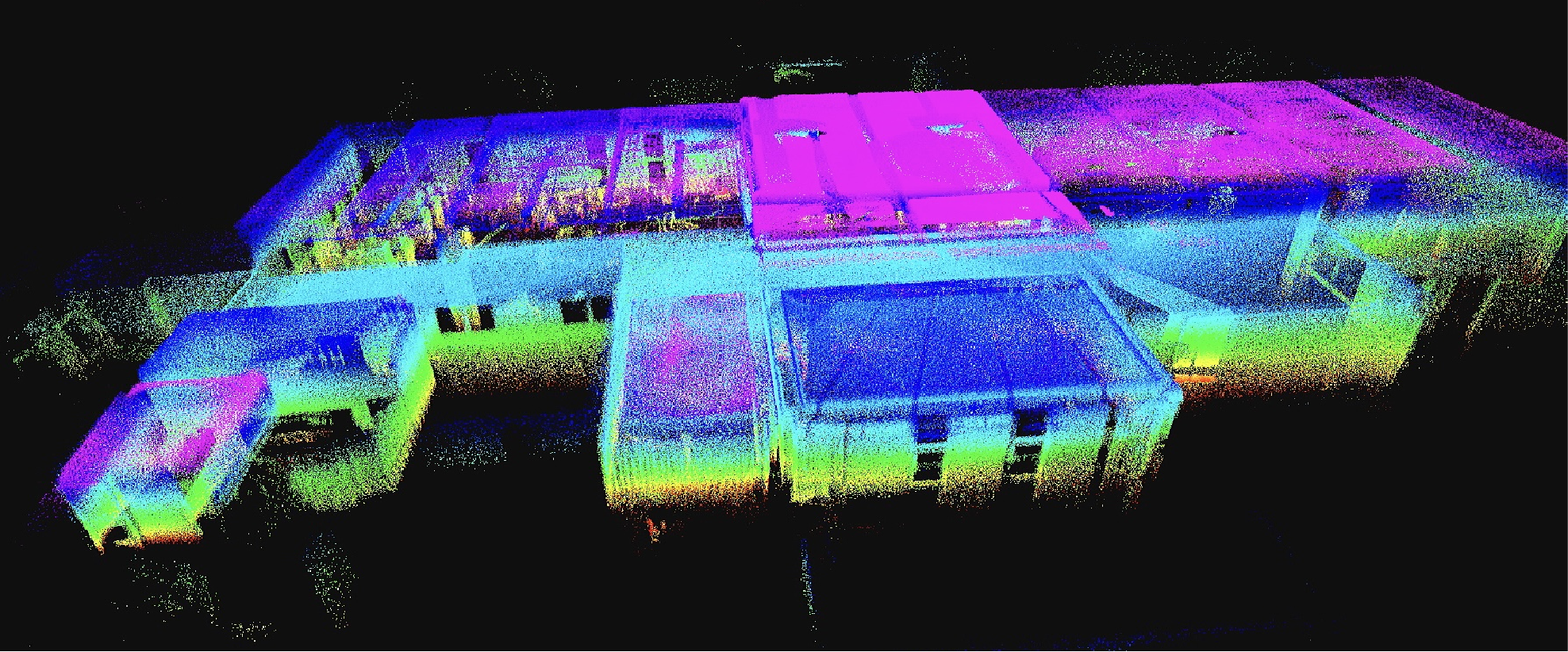
在视觉版的基础上,激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
无人机综合调试与检测实训平台
无人机综合调试与检测实训系统整机功能丰富,既可满足课程教学使用,还可以满足竞赛、研究等需求,可做到一机多用。系统集成了无人机地面站系统、高精度示波器、万用表等多种部件,可满足无人机调试、信号波形查看、各传感器数据查看等需求,还能够满足无人机调试与试飞、不同飞行模式飞行体验等需求,拥有无人机升降平台,能够确保试飞过程中的安全,满足新机组装后验证、维修零件后验证、PID参数调节、抗风性能测试,还能够通过集成的拉力传感器、振动传感器实现零部件疲劳测试、整机及单电机拉力测试、结构震动测试等功能。
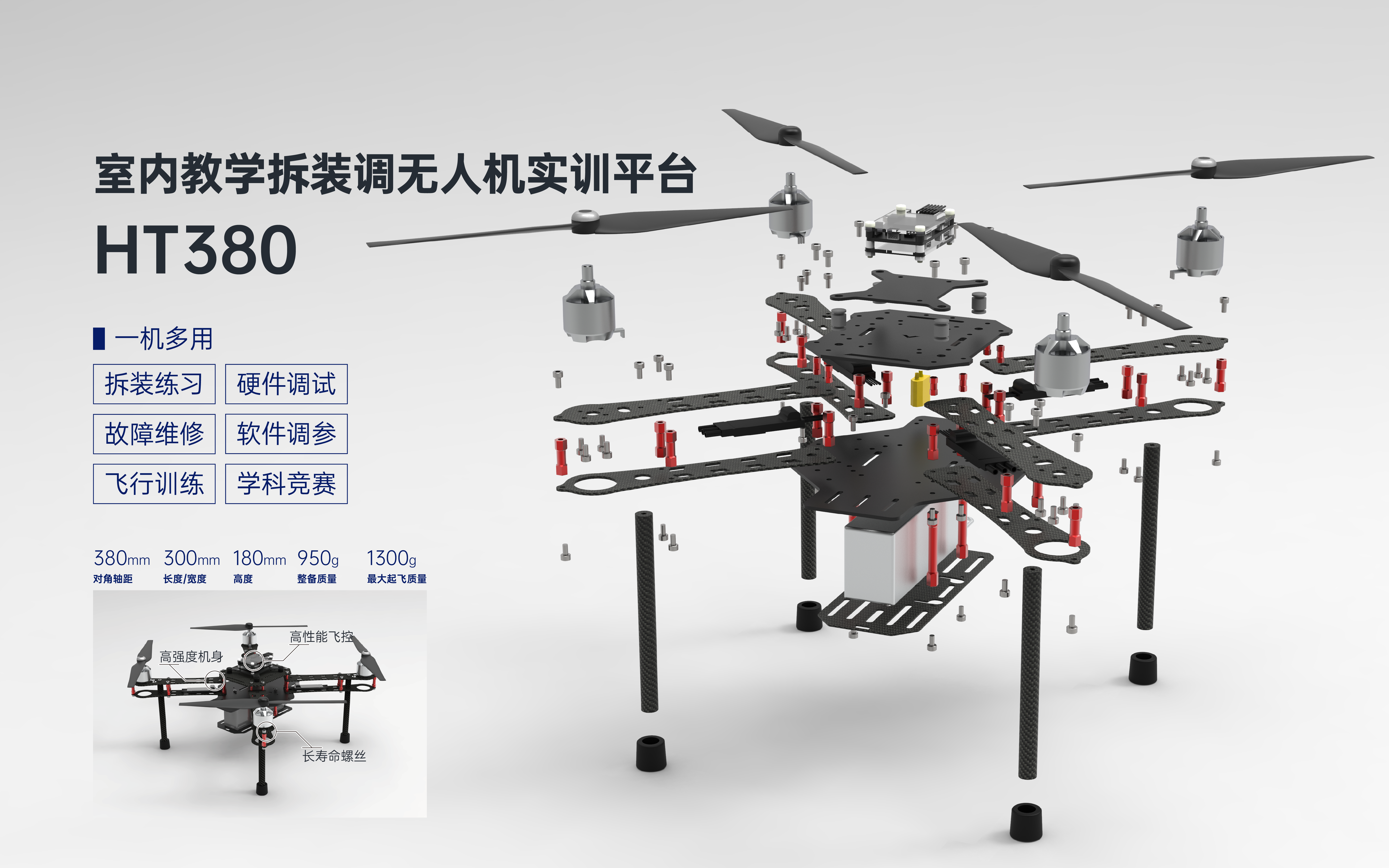
室内教学拆装调无人机实训平台
室内教学拆装调无人机实训平台HT380是一款专为教学而生的无人机实训平台,外观设计精美,机身采用高强度碳纤维和航空铝材质,配以M3内六角碳钢螺丝,牢固可靠,不易损坏,寿命长,可用于反复拆装,能够清晰展示无人机各零部件外观,使学生了解无人机基本构造与原理。配套多自由度桌面调试系统,无人机可通过快拆接口连接到调试器,配套专业遥控器,学生可在室内桌面上进行飞行调试,调参,避免炸机。
提供完备的使用说明书、拆装调试手册、全系列视频教程等学习资料,不仅可进行无人机相关教学以及零部件调试、故障检测维修、地面站调试与设置等学习,还可以用于学科竞赛、二次开发和改装。
无人机智能电池管理系统
无人机智能电池管理系统采用集成式手提航空箱设计,面板包含4路充电组接口,每组包含2-6S充电接口,最多可同时充放 4路2-6S锂聚合物电池。
支持多种安全保护设计,电源输入反接、欠压、过压保护和输出充电反接保护。
实时显示充电状态、每片电池的充电电流、电池电压和充电电量,对电池状态情况一目了然。
可选工作模式,支持轮流充电、同时充电、放电、电压检测;拥有极高的平衡效率,即使不平衡的电池组,在1C充电条件下,充电时间亦不到1小时。
系统功率低,效率高,自身功耗不超过1W,拥有极高的电能使用效率,充电时充电器不发热。
支持电池分析功能,可查看每片电池的起始电压,充电容量,停止电压。
AI视觉无人机开发平台
OWL Mini 3无人机体积小,重量轻,更加适合算法验证。
无人机电池安全防爆柜
这款无人机电池安全防爆柜采用全钢四层结构,内部尺寸为长 510mm、宽 380mm、高 1500mm,可分层存放无人机电池。其核心功能是通过坚固的全钢材质和多层设计,为电池提供安全储存空间,有效隔离和防范电池可能发生的爆炸、起火等风险,保障电池存放过程中的安全性。
无人机智能电池管理系统
无人机智能电池管理系统采用集成式手提航空箱设计,面板包含4路充电组接口,每组包含2-6S充电接口,最多可同时充放 4路2-6S锂聚合物电池。
支持多种安全保护设计,电源输入反接、欠压、过压保护和输出充电反接保护。
实时显示充电状态、每片电池的充电电流、电池电压和充电电量,对电池状态情况一目了然。
可选工作模式,支持轮流充电、同时充电、放电、电压检测;拥有极高的平衡效率,即使不平衡的电池组,在1C充电条件下,充电时间亦不到1小时。
系统功率低,效率高,自身功耗不超过1W,拥有极高的电能使用效率,充电时充电器不发热。
支持电池分析功能,可查看每片电池的起始电压,充电容量,停止电压。
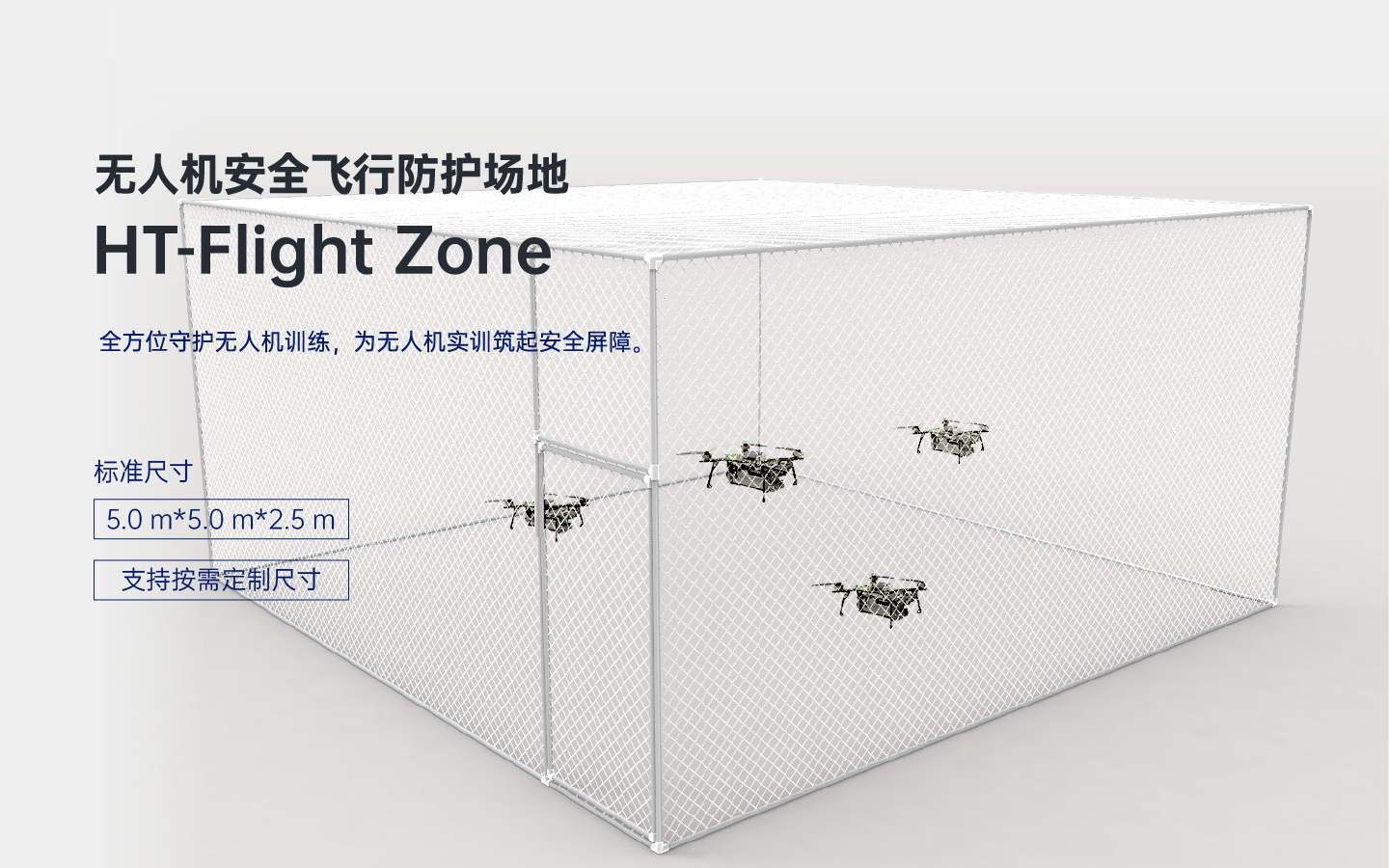
无人机安全飞行防护场地
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。
无人机安全飞行防护场地
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。
实验室设备清单
| 序号 |
设备名称 |
单位 |
数量 |
设备品牌 |
设备型号 |
| 1 |
无人机飞行模拟仿真系统 |
套 |
24 |
中航恒拓 |
HT-SM Max |
| 2 |
无人机算法模拟仿真器 |
台 |
2 |
中航恒拓 |
VISIM |
| 3 |
多旋翼无人机原理示教平台 |
台 |
1 |
中航恒拓 |
YL100 |
| 4 |
嵌入式及无人机案例实验箱 |
套 |
10 |
中航恒拓 |
STM32 Drone ARM |
| 5 |
无人机零部件维修测试实训平台 |
套 |
1 |
中航恒拓 |
WX100 |
| 6 |
AI视觉无人机蜂群开发平台(激光雷达版) |
架 |
10 |
中航恒拓 |
OWL 3LS |
| 7 |
无人机综合调试与检测实训平台 |
台 |
1 |
中航恒拓 |
TS100 |
| 8 |
无人机蜂群控制平台 |
套 |
2 |
中航恒拓 |
V-PC |
| 9 |
室内教学拆装调无人机实训平台 |
架 |
24 |
中航恒拓 |
HT380 |
| 10 |
无人机智能电池管理系统 |
台 |
10 |
中航恒拓 |
HT-Charger |
| 11 |
AI视觉无人机开发平台 |
架 |
1 |
中航恒拓 |
OWL Mini 3 |
| 12 |
无人机电池安全防爆柜 |
台 |
2 |
中航恒拓 |
FB150 |
| 13 |
无人机智能电池管理系统 |
台 |
2 |
中航恒拓 |
HT-Charger |
| 14 |
无人机安全飞行防护场地 |
套 |
1 |
中航恒拓 |
HT-Flight Zone |
| 15 |
无人机组装维修工具套件 |
套 |
24 |
中航恒拓 |
HT-ToolBox |
| 16 |
计算机 |
台 |
18 |
主流品牌 |
主流型号 |
| 17 |
无人机拆装耗材套装 |
套 |
11 |
中航恒拓 |
---- |
| 18 |
六边形桌椅组合 |
套 |
9 |
中航恒拓 |
LT-6 |
| 19 |
拆装调无人机实训平台备用电池 |
块 |
48 |
中航恒拓 |
---- |
| 20 |
无人机安全飞行防护场地 |
套 |
1 |
中航恒拓 |
HT-Flight Zone |
| 21 |
无人机飞行道具 |
套 |
1 |
中航恒拓 |
---- |
| 22 |
电池防爆箱 |
台 |
1 |
中航恒拓 |
HT-FB150 |
| 23 |
设备储存柜 |
套 |
2 |
中航恒拓 |
--- |
| 24 |
储物架 |
套 |
1 |
中航恒拓 |
---- |
| 25 |
无人机概论课程资源包 |
套 |
1 |
中航恒拓 |
XT-V1.0 |
| 26 |
无人机模拟飞行课程资源包 |
套 |
1 |
中航恒拓 |
XT-V4.0 |
| 27 |
无人机空域与法规课程资源包 |
套 |
1 |
中航恒拓 |
XT-V3.0 |
| 28 |
无人机装配调试课程资源包 |
套 |
1 |
中航恒拓 |
XT-V7.0 |
| 29 |
无人机飞行原理与性能课程资源包 |
套 |
1 |
中航恒拓 |
XT-V6.0 |
| 30 |
航空气象课程资源包 |
套 |
1 |
中航恒拓 |
XT-V2.0 |
| 31 |
无人机算法入门课程资源包 |
套 |
1 |
中航恒拓 |
XT-V8.0 |
| 32 |
飞控与地面站课程资源包 |
套 |
1 |
中航恒拓 |
XT-V5.0 |
| 33 |
桌椅 |
套 |
24 |
中航恒拓 |
主流型号 |
主要课程与实验
无人机模拟飞行
通过在计算机上模拟无人机飞行,能够降低实际飞行中的风险,提升训练速度和效率。
训练内容主要包括:
■ 实验1:多旋翼起飞与降落训练;
■ 实验2:多旋翼对尾悬停训练;
■ 实验3:多旋翼对头悬停训练;
■ 实验4:多旋翼右侧悬停飞行训练;
■ 实验5:多旋翼左侧悬停飞行训练;
■ 实验6:多旋翼航线动作训练;
■ 实验7:操控固定翼飞机的基本方法;
■ 实验8:操纵固定翼飞机转弯的基本方法;
■ 实验9:固定翼着陆训练;
■ 实验10:固定翼正方形航线飞行训练;
■ 实验11:固定翼 8 字航线飞行训练等。
基于VISIM的飞行模拟
基于模拟器实现相关验证与开发。
■ 实验1 单台OWL无人机模拟
■ 实验2 多台OWL无人机模拟
■ 实验3 QGC控制单台OWL
■ 实验4 从命令行向单台OWL发送takeoff, landing, start, 和stoptask指令
■ 实验5 用rviz显示单台OWL传感器发出的数据
■ 实验6 OWL定点追踪移动物体
■ 实验7 路径规划:OWL简单路径规划,通过rviz设置目标位置
■ 实验8 路径规划:OWL使用ego_planner规划飞行路线,命令行与rviz结合控制
■ 实验9 用QGC和命令行控制多台OWL
■ 实验10 用rviz显示多台OWL传感器发出的数据
■ 实验11 通过rostopic向单台/多台OWL发布数据和命令
■ 实验12 OWL蜂群避障
嵌入式系统及飞行控制系统原理与开发
基于ARM Cortex嵌入式系统,开发多旋翼无人机飞控系统。综合应用控制和传感器相关知识,在课程组提供的嵌入式系统开发板上,开发传感器采集模块、传感器数据融合和滤波模块、内环控制模块、外环控制模块、通信模块等,并将诸模块进行整合,形成一套完整的多旋翼无人机飞行控制系统。能够满足从单片机入门至传感器数据采集再到PID等全套实验需求。
STM32相关基础实验
■ 实验1:GPIO实验,点亮流水灯
■ 实验2:按键操作实验
■ 实验3:定时器与外部中断实验,实现LED定时闪烁与呼吸灯
■ 实验4:串口收发实验
■ 实验5:呼吸灯实验
■ 实验6:蜂呜实验
■ 实验7:电机驱动及空心杯电机实验
■ 实验8:TFT LCD实验
■ 实验9:ADC采样实验,并获取电池电压
■ 实验10:DAC输出正弦波实验
■ 实验11:WIFI实验
■ 实验12:MS5611实验
■ 实验13:SD卡实验,将SD卡中图片显示在TFT LCD
■ 实验14:SPI读取IMU数据实验
■ 实验15:IIC读取气压计 MS5611 数据
■ 实验16:PPM实验,遥控器定时器输入捕获
■ 实验17:PWM实验,通过外设输出PWM波控制蜂鸣器的音调
■ 实验18:磁力计数据获取实验
■ 实验19:陀螺仪积分获取角度
■ 实验20:传感器低通滤波实验
■ 实验21:加速度计3轴分解实验
■ 实验22:音频输出播放实验
■ 实验23:麦克风音频输入及信号处理输出实验
■ 实验24:ucos Mahony滤波实验
■ 实验25:ucos led实验
飞行控制系统相关实验
■ 实验1:陀螺仪实验,掌握陀螺仪数据及原理,获取角速度数据并计算角度。
■ 实验2:加速度实验,掌握加速度计原理,获取加速度数据并计算角度。
■ 实验3:磁力计实验,掌握磁力计原理,获取磁力计数据并计算角度。
■ 实验4:传感器校准实验,了解传感器误差来源,掌握传感器校准方法和软件实现。
■ 实验5:传感器低通滤波实验,掌握巴特沃斯低通滤波器设计,实现滤波器调参。
■ 实验6:姿态解析实验,了解无人机姿态表示方法,掌握 Mahony 滤波算法。
■ 实验7 DCM 方向余弦矩阵实验,了解方向预选矩阵,对 DCM 进行应用,获取运动加速度数据。
■ 实验8:无人机控制系统建模及实现。
■ 实验9:无人机对轴平衡调试试验。
■ 实验10:无人机定高飞行实验。
■ 实验11:无人机遥控飞行实验。
无人机结构与系统
该课程旨在使学生深入了解无人机的结构组成、各部件功能以及整体系统的工作原理。通过理论学习与实践操作相结合,学生能够掌握无人机的基本构造和系统设计原理。
■ 实验1:识别无人机各部件外观
■ 实验2:无人机相关软件安装与基本操作
■ 实验3:C++与Git
■ 实验4:遥控器使用
无人机组装与调试
这是一门实践性很强的课程,学生将亲手进行无人机的组装与调试工作,通过实际操作,学生将掌握无人机的组装流程、调试技巧以及测试方法,确保无人机能够正常、稳定地运行。
■ 实验1:无人机组装
■ 实验2:无人机零部件更换
■ 实验3:无人机零部件调试
■ 实验4:起飞前设置(固件、参数、传感器、电机、螺旋桨)
ROS及相关技术
ROS系统而是一个运行在Linux等操作系统之上的次级操作系统。它通过提供硬件抽象、底层设备控制、进程间消息传递等功能,帮助开发者高效地创建和管理机器人应用软件,将机器人的软件功能模块化,形成一个个节点,这些节点可以通过发送消息进行通信,从而实现复杂的机器人行为。
■ 实验1:Ubuntu操作系统安装
■ 实验2:Ubuntu操作系统安装应用程序
■ 实验3:Ubuntu操作系统命令行操作
■ 实验4:ROS的安装
■ 实验5:ROS的运行(海龟移动)
■ 实验6:安装Visual Studio Code编辑器
■ 实验7:配置ROS环境并实现“Hello World”
无人机视觉
实验目的:了解和掌握无人机视觉跟踪技术的基本原理和实现方法
实验内容:由于无人机能搭载的传感器和处理器性能有限,因此与常规数字图像处理方法相比,要求所应用的方法同时具备实时性和可靠性。本实验需要综合应用SIFT、SURF、YOLO等视觉跟踪方法,利用学生自己的计算机,实现视觉跟踪,并要求在实验中开始学习使用ROS(机器人操作系统)、OpenCV等工具。
■ 实验1:K-MEANS网络搭建
■ 实验2:GAN网络搭建
■ 实验3:CGAN网络搭建
■ 实验4:YOLO网络搭建(V1-V8)
■ 实验5:基于YOLO实现目标识别
无人机滤波和传感技术
实验目的:了解和掌握无人机使用传感器和滤波器的基本原理
实验内容:本实验主要针对无人机控制系统中所使用的传感器和滤波器基本原理,包括IMU(惯性传感器)、GPS(全球定位系统)或北斗定位系统、Kalman滤波器或互补滤波器,通过实验,使用实际无人机上采集的传感器数据来融合出可靠的位姿数据,巩固所学知识。
■ 实验1:多传感器数据融合
■ 实验2:前端光流
■ 实验3:高效的去畸变方式
■ 实验4:误差卡尔曼滤波
■ 实验5:连续时间预积分误差传递
■ 实验6:离散时间预积分误差传递
同步定位与建图
实验目的:了解和掌握无人机同步定位建图基本原理和实现方法
实验内容:本实验主要探索无人机在不依靠外部定位手段,如GPS、无线基站和动作捕捉系统等的情况下,仅依靠自身携带的传感器进行导航、定位和地图建立的SLAM(同步定位建图)方法,合作完成一种或几种典型的SLAM方法原理调研、实际运行测试、评价等。
■ 实验1:VINS-Mono代码编译运行
■ 实验2:预积分零偏建模方式
■ 实验3:VIO初始化
■ 实验4:VIO数据预处理
■ 实验5:旋转外参初始化
■ 实验6:ceres解析求导以及核函数
■ 实验7:预积分残差计算
■ 实验8:预积分雅可比计算
■ 实验9:视觉重投影
■ 实验10:视觉雅可比
■ 实验11:滑动窗口边缘化
■ 实验12:VINS_Fusion介绍及运行
■ 实验13:VINS_Fusion光流优化
■ 实验14:VINS_Fusion初始化
■ 实验15:VINS_Fusion后端优化
■ 实验16:鲁棒的外点剔除策略
■ 实验17:VINS_Fusion的GPS融合
无人机位姿控制
实验目的:以多旋翼无人机为例,了解无人机位姿控制的基本原理和方法,并通过实验对无人机的闭环相应特性获得直观认识。
实验内容:本实验将基于室内无人机飞行实验,学习和体验无人机姿态位置和姿态控制的控制器设计和调节方法,包括姿态环(内环)参数调节、位置环(外环)参数调节、扰动抑制、轨迹跟踪等环节。通过实验,同学可以更深入了解无人机控制器的构成和不同控制器参数对于飞行品质的影响。
■ 实验1:无人机的数学模型
■ 实验2:无人机动力模型
■ 实验3:无人机姿态模型
■ 实验4:无人机位置模型
■ 实验5:无人机模型线性优化
■ 实验6:基于欧拉角的控制器
■ 实验7:PID控制
■ 实验8:基于四元数的控制器
■ 实验9:基于旋转矩阵的控制器
无人机视觉控制
实验目的:了解无人机视觉控制的基本原理,通过实验掌握无人机视觉的基本方法。
实验内容:本实验将基于机载立体摄像头的口袋式室内无人机实验平台,学习无人机视觉跟踪的基本原理,包括图像跟踪、解耦控制、轨迹平滑等环节。
■ 实验1:回环检测数据流
■ 实验2:基于dbow的回环检测
■ 实验3:回环校验
■ 实验4:通过后端滑窗优化回环帧位姿
■ 实验5:四自由度位姿图优化
■ 实验6:视觉地图的保存和加载
基于PX4的开源飞控系统
实验目的:基于PX4开源平台,研究并调试多旋翼无人机飞控系统。
实验内容:综合应用控制和传感器相关知识,在课程组提供的PX4系统上,学习传感器采集模块、传感器数据融合和滤波模块、内环控制模块、外环控制模块、通信模块等的开发方法,并利用Mavros(MAVLink + ROS)开发相应的机载计算机程序,实现上位机对无人机的实时操控。
■ 实验1:基于PX4的四旋翼建模与控制
■ 实验2:四旋翼模型与控制基础
■ 实验3:实际飞行测试
■ 实验4:日志分析
■ 实验5:传感器与遥控器校准原理
■ 实验6:PX4自定义任务并执行
■ 实验7:PX4自定义参数并使用QGC显示
■ 实验8:PX4自定义uORB消息并保存到日志
■ 实验9:PX4控制算法
■ 实验10:PX4中uORB概览
■ 实验11:PX4位置-姿态-角速度控制逻辑
■ 实验12:基于SO3的姿态控制
■ 实验13:TD微分跟踪器原理与仿真
■ 实验14:ADRC误差组合
■ 实验15:LESO原理与仿真
■ 实验16:LADRC角速度环Simulink仿真
■ 实验17:LADRC飞控C++代码编写
■ 实验18:LADRC仿真与实物测试分析
■ 实验19:非线性ADRC原理与仿真
■ 实验20:一键起飞
■ 实验21:自动降落
■ 实验22:速度平滑
单目视觉跟踪与识别系统
实验目的:研究和探索无人机单目视觉追踪和识别的方法。
实验内容:综合应用计算机视觉和深度学习等相关知识,学习和开发基于特征的无人机视觉识别与跟踪方法、基于深度学习的无人机视觉与跟踪方法,并在安装有Ubuntu和Ros的计算机上实现。
■ 实验1:单目视觉位姿估计
■ 实验2:基于ceres自动求导的单目视觉BA优化
■ 实验3:陀螺仪零偏初始化
■ 实验4:视觉惯性对齐求解
■ 实验5:基于已知重力的视觉惯性对齐调整
立体视觉导航与避障系统
实验目的:研究和探索无人机立体视觉导航和避障方法。
实验内容:应用深度相机、激光雷达等具备深度测量能力的传感器,学习和开发无人机立体视觉同步定位建图导航方法、基于特征或学习的避障方法,并在安装有Ubuntu和Ros的计算机上实现。
无人机虚实融合仿真系统
实验目的:研究和探索无人机虚实融合仿真方法。
实验内容:应用Ros提供的Gazebo等工具,通过无线或有线方式接入开源飞控Px4的数据,开发完整的无人机虚实融合仿真系统,在虚拟系统中为无人机安装单目摄像头、深度摄像头、激光雷达等视觉传感器,实现虚拟环境下的无人机自主任务规划与飞行测试。
无人机视觉导航与避障技术
实验目的:研究和探索无人机视觉导航和避障方法。
实验内容:基于搭载轻量化计算平台、双目摄像头和和PX4飞控系统的微型无人机,开发算力受限情况下的无人机自主双目点云生成算法、视觉导航算法和自主避障算法,在室内实现飞行验证。
无人机视觉编队与任务规划技术
实验目的:研究和探索无人机视觉编队与任务规划方法。
实验内容:基于搭载轻量化计算平台、双目摄像头和和PX4飞控系统的微型无人机,开发算力受限情况下的分布式无人机视觉编队方法、集中式/分布式/智能式任务规划方法,并在室内实现飞行验证。
无人机编队实验
实验目的:认识在不同的无人机编队协议下,无人机编队的性能。
实验内容:利用Matlab和QuarQ等工具进行编程,通过WiFi建立服务器和无人机集群之间的通信,实现无人机集群的集中式和分布式编队飞行,并通过航迹变换和施加外部干扰等,验证不同的编队协议的鲁棒性和快速性之间的差异。
无人机智能任务规划
实验目的:通过实验综合掌握无人机全自主飞行及智能任务规划相关的方法。
实验内容:在机载Ubuntu和Ros系统上进行编程,并通过Mavros等工具与机载PX4飞控系统通信,利用机载双目摄像头采集的视觉数据生成点云,实现无人机在无GPS等外部导航手段的引导下的自主定位、自主导航、避障、路径规划和目标匹配,最终完成在开阔实验室空间内的智能任务规划。
配套课程资源
无人机模拟飞行训练
提供关于升降舵悬停练习、副翼舵悬停练习、升降舵+副翼舵悬停练习、四位悬停练习、八位悬停练习、自悬360度练习、正八字练习、无人机起降练习等视频教程。
无人机基本理论
无人机概论教材配套PPT课件,包含无人机的相关概念、特点和分类、无人机的发展历史现状与未来、无人机结构与系统、无人机的基本结构。航空气象PPT课件,主要包括大气的成分、基本气象要素、空气的水平运动、空气的垂直运动、云的分类、降水、能见度、低空风切变,能见度、视程障碍、气团和锋、锋面天气、雷暴、雷暴与飞行、飞机颠簸、飞机积冰。
无人机空域与法规电子版教材及PPT课件,主要包括空域知识、AC61《民用无人机驾驶员管理规定》、AC91《民用无人机运行管理规定》,《民用无人机驾驶航空系统空中交通管理办法》、《民用无人机驾驶航空器实名登记管理规定》、《民用无人机驾驶员合格审定规则》、《民用无人驾驶航空器经营性飞行活动管理规定》。无人机飞行原理与性能电子版教材,主要包括标准大气及其物理性质、流动气体的基本规律、飞机的几何外形和参数、升力的产生、影响飞机升力的因素、阻力、速度、高度、续航、速度、高度、续航、起飞降落与机动性能。
嵌入式系统及无人机飞控开发
视频教程,主要包括BirdFlight软件系统初始化详解、四旋翼全模型控制原理详解、无人机位置控制、无人机视觉识别与位置控制教学、飞控工程之系统初始化流程、空心杯无人机安装开箱视频、空心杯无人机调试。
配套共包括28个实验教学实验指导书。
无人机装配调试
实训手册及视频课程,视频课程主要包括室内教学拆装调无人机实训平台组装上机臂及电机、组装上机臂20mm铝柱、组装下机臂、组装脚垫及机腿、组装电池板、安装机臂、安装电源模块及连接电调线、焊接电调线及BB响、安装LED灯及飞控、连接电调信号线和安装上主板、安装接收机并连接飞控线、固定电调和接收机天线、安装无人机桨叶、安装安全拉杆。
无人机与深度学习
主要包括无人机算法、无人机与深度学习视频教程,主要包括零基础入门四旋翼建模与控制等。
人工智能基础
主要包括深度学习经典检测方法概述、K-MEANS、生成对抗网络、条件生成对抗网络等视频课程。
机器视觉
主要包括AlexNet网络思想与网络架构、YOLO-V1整体思想与网络架构、YOLO-V2改进细节详解、YOLO-V3核心网络模型、基于V3版本进行源码解读、YOLO V4和V5、迁移学习与Resnet网络等相关视频课程。
ROS和SLAM
主要包括ROS基础、机器人环境感知、机器人SLAM与自主导航、多模态SLAM技术和算法框架、激光-惯性子系统(LIS)及代码精读、视觉-惯性子系统(VIS)及代码精读、激光-视觉-惯性数据融合与优化融合、ROS理论与实践Moveit、ROS机器人综合应用等相关PPT、教案和视频课程。