无人机编队与开发实训室以“协同控制+开发创新”为核心,构建了一个多维度、场景化的实践空间。学生既能在编队飞行训练中操控多架无人机完成灯光秀等复杂任务,感受协同控制的精密与高效;又能在开源硬件平台上通过代码编程实现自主避障、路径规划等智能功能,激发技术创新能力。让学生在真实环境中设计解决方案,实现“学以致用”的闭环训练。

无人机蜂群表演编队支持手控飞行、定点飞行、自主航线飞行、自主返航等控制模式,支持横队、纵队、三角、方队、倒V、正V、包围式队形切换等编队模式。地面站软件支持无人机姿态、位置、电池、连接状态显示,支持报警信息提醒、指令发送、回传数据显示,支持目标工作区地图保存和显示、队形编辑、保存与加载。集控制、编辑一体,可预览已编程的飞行轨迹,动画展现飞行姿态,支持2D、3D模拟飞行,支持自动计算避障线路和防碰撞预警。
仓鸮(Tytoalba)无人机专注无GPS受限空间三维数据抓取及环境感知,支持自主充电,配备独立的地面站。采用国产化芯片多传感器融合,单一传感器丢失或失效情况下仍能保证其运行。
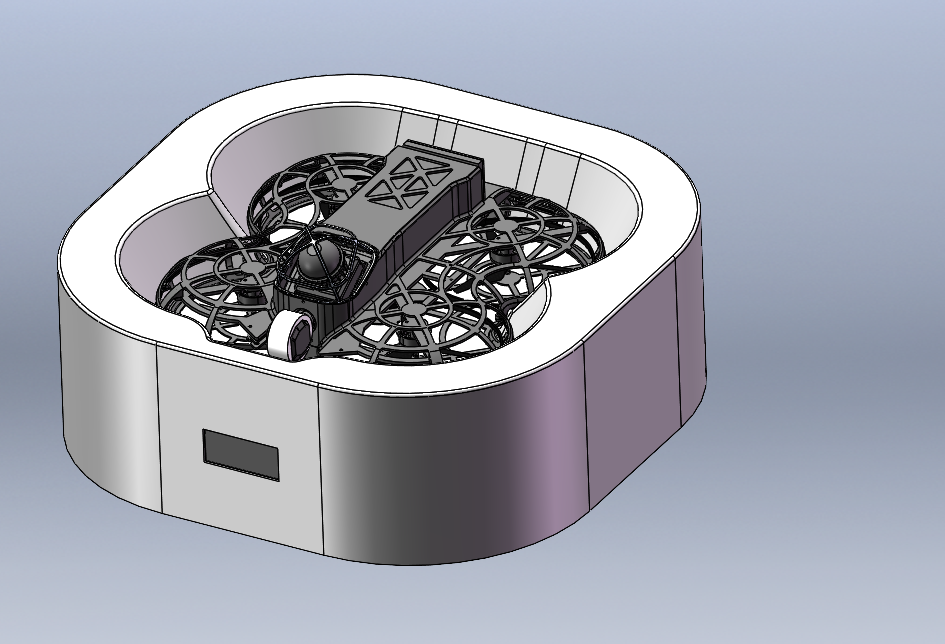
无人机机巢具备存储保护、自动充电、任务规划调度、数据处理传输及远程管控等功能,可保障无人机高效、安全运行。

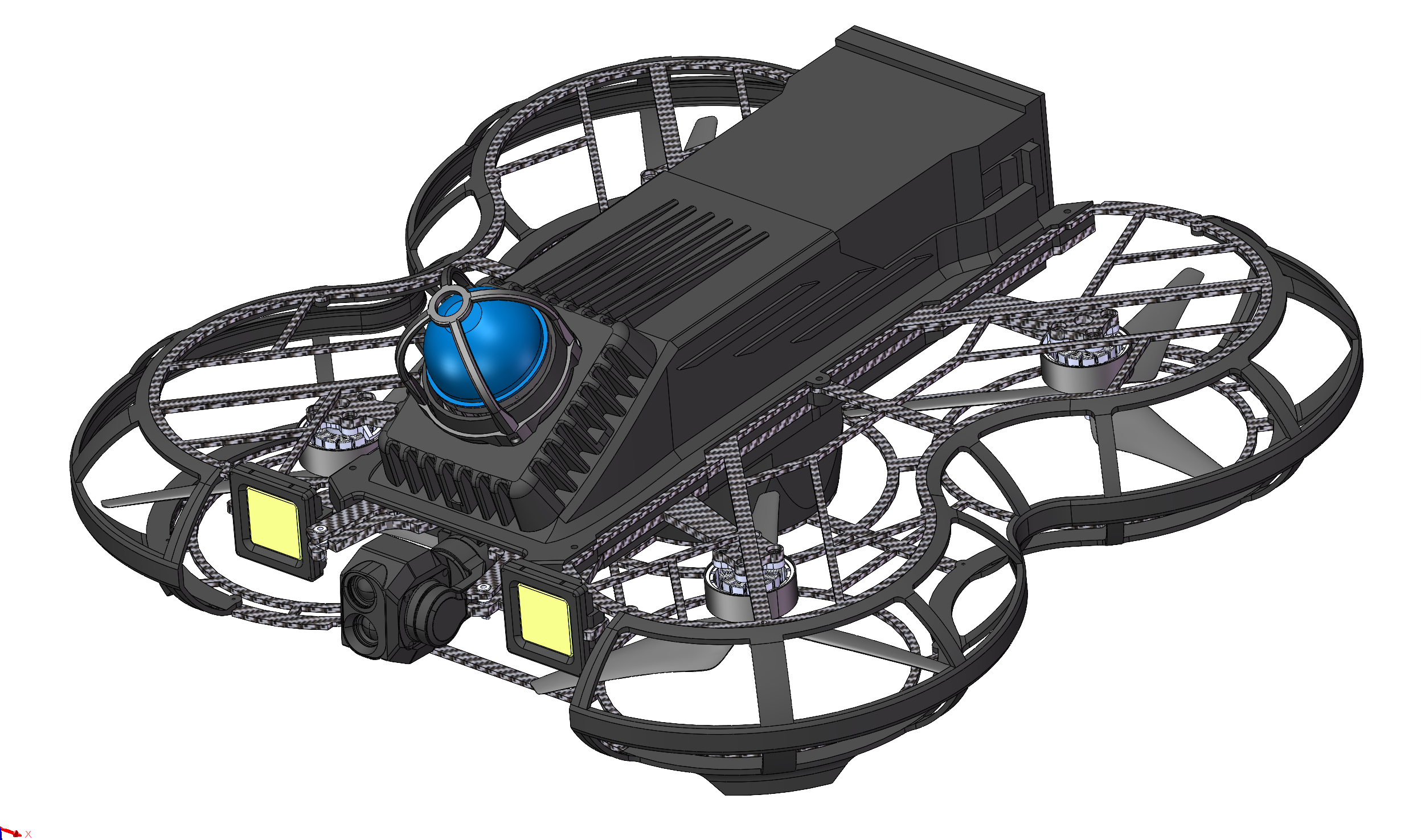
激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL mini3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

HT600是一款专为教学而生的无人机开发实训平台,适用于作为室外实操教学六旋翼无人机飞行平台使用。
采用碳纤维可折叠机身,既可用于教学开发,也可以用于室外飞行训练、调试,通过配套地面站软件可进行PID参数调节、传感器校准、参数设置、航线规划等实训环节,开源飞控,可二次开发,还可以实现自主飞行。整机结构牢固,承载能力强,可挂载寻迹、小球投放、钩瓶、激光打靶、航拍、机械臂、机械爪等各类设备,符合国际机器人挑战赛无人机自主飞行赛项、中国工程机器人大赛无人机赛项等竞赛的要求。

这款无人机电池安全防爆柜采用全钢四层结构,内部尺寸为长 510mm、宽 380mm、高 1500mm,可分层存放无人机电池。其核心功能是通过坚固的全钢材质和多层设计,为电池提供安全储存空间,有效隔离和防范电池可能发生的爆炸、起火等风险,保障电池存放过程中的安全性。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | 无人机蜂群表演编队 | 架 | 1 | 中航恒拓 | HT-BY200 |
| 2 | 复杂场景智能巡检无人机 | 架 | 1 | 中航恒拓 | 仓鸮Tytoalba |
| 3 | 自动充电机巢 | 台 | 1 | 中航恒拓 | ---- |
| 4 | AI视觉无人机开发平台(激光雷达版) | 架 | 2 | 中航恒拓 | OWL Mini 3L |
| 5 | 六旋翼无人机飞行开发平台 | 架 | 4 | 中航恒拓 | HT600 |
| 6 | 计算机 | 台 | 5 | 主流品牌 | 主流型号 |
| 7 | 六边形桌椅组合 | 套 | 5 | 中航恒拓 | LT-6 |
| 8 | 无人机电池安全防爆柜 | 台 | 1 | 中航恒拓 | FB150 |