通过构建安全可控的标准化空间,系统性整合风险防护、技能实训、科研验证与竞技应用功能,既为无人机操作训练提供低风险、高复现性的技术实践平台,又为算法开发、任务场景创新及多机协同研究提供可量化的实验载体,同时满足赛事备战、科普教育和工业级应用测试的复合需求,形成从基础操控到前沿探索的全链条支撑体系,最终推动无人机技术迭代与产业生态协同发展。

无人机综合调试与检测实训系统整机功能丰富,既可满足课程教学使用,还可以满足竞赛、研究等需求,可做到一机多用。系统集成了无人机地面站系统、高精度示波器、万用表等多种部件,可满足无人机调试、信号波形查看、各传感器数据查看等需求,还能够满足无人机调试与试飞、不同飞行模式飞行体验等需求,拥有无人机升降平台,能够确保试飞过程中的安全,满足新机组装后验证、维修零件后验证、PID参数调节、抗风性能测试,还能够通过集成的拉力传感器、振动传感器实现零部件疲劳测试、整机及单电机拉力测试、结构震动测试等功能。

无人机零部件维修测试平台主要面向无人机调试与综合应用维修测试实训工作,通过该维修测试平台,学生能够掌握无人机常见故障维修及综合测试应用。
平台构造合理,操作便捷,功能丰富,采用一体集成式设计,配备防静电实验操作台,集成波形采集模块,波形发生器,数字万用表,可编程直流电源,可编程直流电子负载等设备,可用于无人机调试与综合应用维修测试实训、无人机常见故障维修及综合测试应用,能够进行无人机电机、控制机构、信号传输、遥控器等部分测试并可对控制程序进行综合编程练习,还可以用于无人机软件调试、参数设置、地面站及应用程序开发等。

猫头鹰3,实战派。全能旗舰,助力科研成果转化落地,与猫头鹰Mini 3相比,猫头鹰 3体型更大,负载更强,能够搭载更多设备,适用于更多场景。


OWL 3L搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。
激光雷达定位基于LiDAR激光传感器获得的点云数据,融合惯性导航模块的6轴数据,实现LIO算法。
视觉定位基于双目视觉传感器捕获的双目图像,融合惯性导航模块数据,实现VIO算法。
可基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。
支持基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能够提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,激光雷达传感器受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

HT600是一款专为教学而生的无人机开发实训平台,适用于作为室外实操教学六旋翼无人机飞行平台使用。
采用碳纤维可折叠机身,既可用于教学开发,也可以用于室外飞行训练、调试,通过配套地面站软件可进行PID参数调节、传感器校准、参数设置、航线规划等实训环节,开源飞控,可二次开发,还可以实现自主飞行。整机结构牢固,承载能力强,可挂载寻迹、小球投放、钩瓶、激光打靶、航拍、机械臂、机械爪等各类设备,符合国际机器人挑战赛无人机自主飞行赛项、中国工程机器人大赛无人机赛项等竞赛的要求。
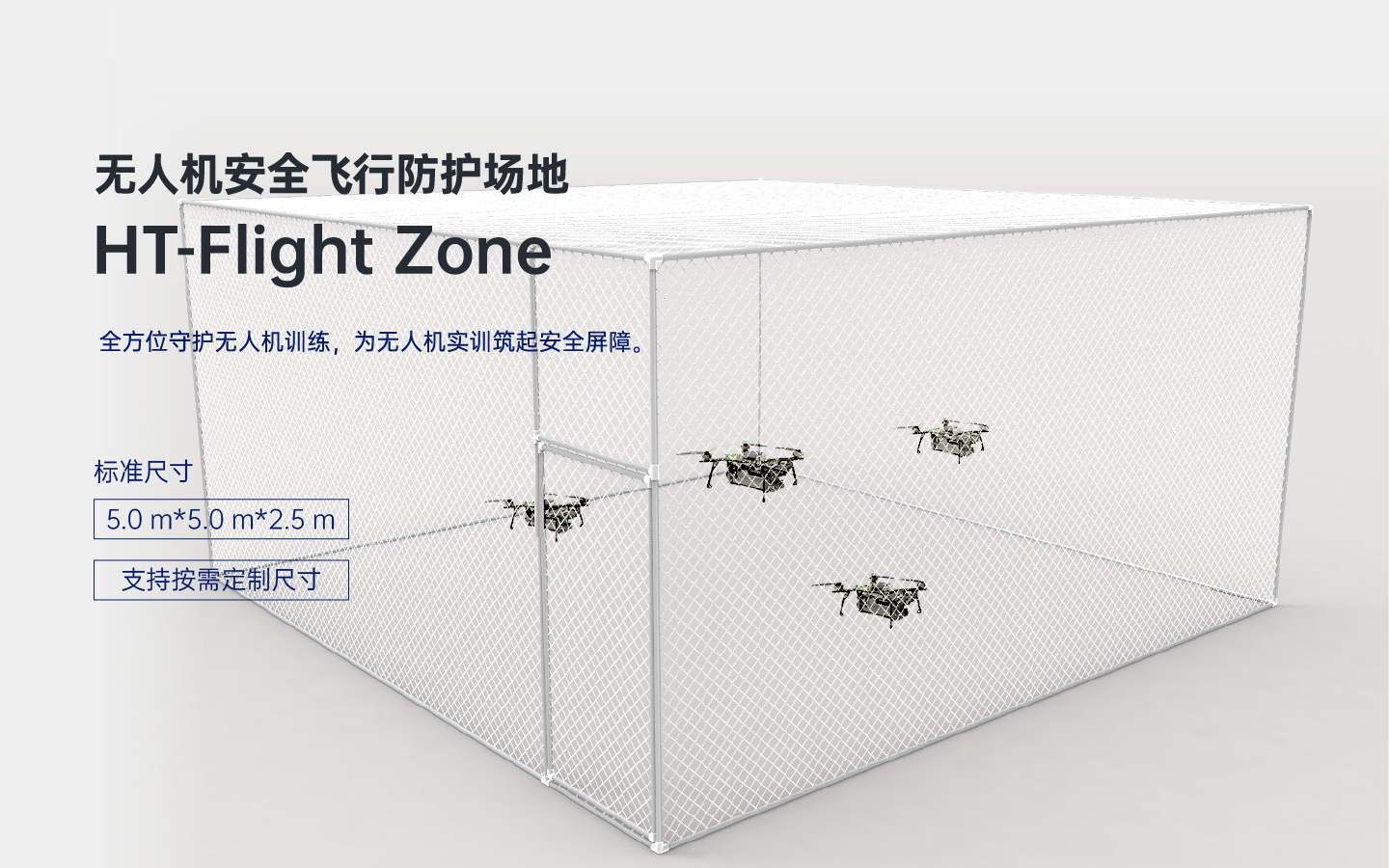
无人机飞行安全防护场地全方位守护无人机飞行训练和科学研究,为无人机实训实验筑起安全屏障,可避免因操作失误导致的人员受伤。
场地标准尺寸为5.0 m × 5.0 m × 2.5 m,采用桁架骨架结构、5英寸尼龙防护网,配套海绵地垫,不仅可用于无人机日常和赛前训练,也可搭建任务场地用于课题研究实验和各类创新实践。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | 无人机综合调试与检测实训平台 | 台 | 3 | 中航恒拓 | TS100 |
| 2 | 无人机零部件维修测试实训平台 | 套 | 3 | 中航恒拓 | WX100 |
| 3 | AI视觉无人机开发平台(激光雷达版) | 架 | 1 | 中航恒拓 | OWL 3L |
| 4 | 六旋翼无人机飞行开发平台 | 架 | 15 | 中航恒拓 | HT600 |
| 5 | 无人机安全飞行防护场地 | 套 | 1 | 中航恒拓 | HT-Flight Zone |
| 6 | 无人机飞行道具 | 套 | 1 | 中航恒拓 | ---- |
| 7 | 储物架 | 套 | 1 | 中航恒拓 | ---- |