空地协同实训室集空地通信链路测试、多传感器融合感知、自主决策控制、多机协同调度于一体,可全面支撑应用场景的算法开发与实飞验证,空地异构平台互联互通测试(无人机+无人车)边缘计算节点部署与任务卸载验证、视觉/雷达/AIS多源目标识别与跟踪、以及基于真实场景数据的算法迭代与模型优化等教学与科研任务,覆盖"感知—通信—控制—协同全技术链条的低空经济综合实验平台。

激光雷达版搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。激光定位基于LiDAR激光传感器获得的点云数据,并且融和惯性导航模块的6轴数据,实现的LIO算法。视觉定位是通过基于双目视觉传感器的双目图像,融和惯性导航模块数据,实现的VIO算法。可以基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。避障功能是基于定位结果,基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
激光雷达通过发射激光束并接收反射光来测量距离,能提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL mini3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。

基于ROS操作系统开发的智能视觉搬运机器人,以树莓派4B为主控,采用Python编程,在视觉机械臂的基础上,增加了一个可以全向移动的麦克纳姆轮底盘,使得机器人可以进行移动抓取、目标追踪、智能搬运等功能,底盘可以自由拆卸,既可以作为桌面视觉机械臂使用,也可以作为移动视觉机械臂使用,提供源代码及两百多节课程资料,帮助用户更好的学习相关知识。能够与无人机配合实现空地协同。
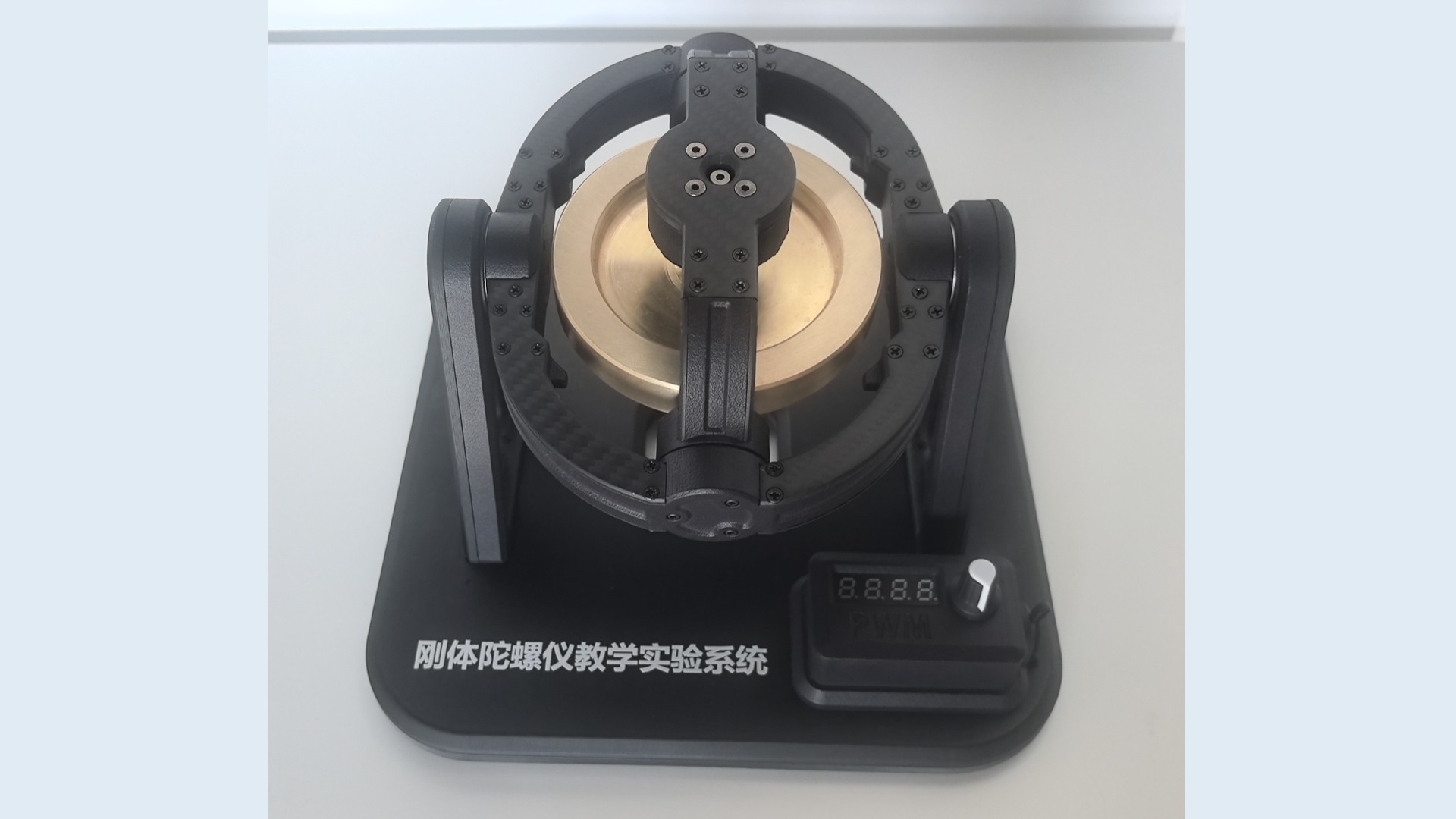
本系统采用一体化集成设计,集精密双轴万向架、高速无刷驱动、高精度IMU传感与专业分析软件于一体,通过直观的运动演示与精确的数据测量,生动呈现角动量守恒、定轴性、进动与章动等核心物理规律。学生可亲手操作并观察高速旋转转子在惯性空间中的指向稳定性,定量研究外力矩与进动角速度的关系,并通过上位机软件实时获取三维姿态、角速度等多维度数据,进行可视化分析与处理。系统安全可靠,操作直观,不仅能够加深学生对抽象理论的理解,更可培养其科学探究与工程实践能力,是理论与实验相结合的理想教学平台。

无人机通信原理教学实验系统是无人机实训室的核心教学平台,专注于揭示无人机天地通信的底层原理。系统集成图传、数传、遥控等真实通信链路,学生可通过频谱仪直观观测2.4GHz、5.8GHz、915MHz等频段的信号特征,进行信道测量、干扰分析、天线对比等实验。它彻底改变了“只飞不通”的传统教学模式,将教学深度从飞行操作延伸至通信数据链层面,旨在培养学生对无线通信系统的深刻理解、测量分析及故障排查能力,为未来从事无人机通信设计、调试与优化工作奠定坚实基础。
| 序号 | 设备名称 | 单位 | 数量 | 设备品牌 | 设备型号 |
|---|---|---|---|---|---|
| 1 | AI视觉无人机开发平台(激光雷达版) | 架 | 1 | 中航恒拓 | OWL Mini 3L |
| 2 | 无人车开发平台 | 套 | 2 | 中航恒拓 | HT-CAR |
| 3 | 空地协同系统软件包 | 套 | 1 | 中航恒拓 | ASCS |
| 4 | 刚体陀螺仪教学实验系统 | 套 | 2 | 中航恒拓 | HT-AXIS |
| 5 | 无人机通信原理教学实验系统 | 台 | 2 | 中航恒拓 | TX100 |