猫头鹰3,实战派,全能旗舰,助力科研成果转化落地,与OWL mini 3相比,OWL 3 体型更大,负载更强,能够搭载更多设备,更适用于多场景。


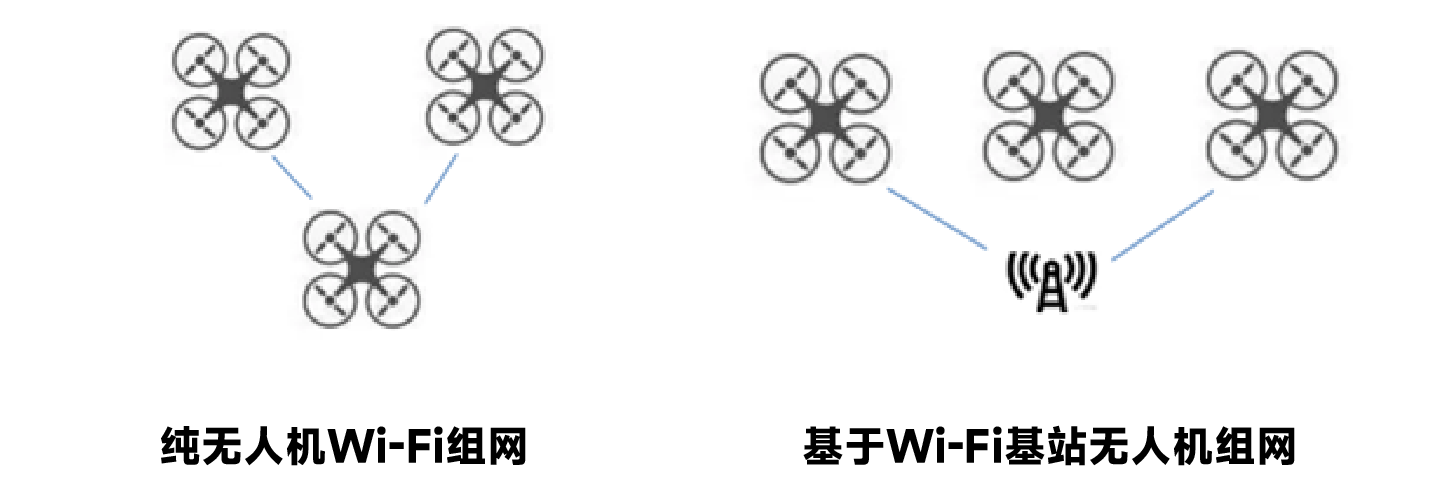
蜂群软件架构包括单机系统和算法软件,多机协同软件,多机通讯机制。在多机协同环境,还需要协调多机轨迹、位置、同步完成多机目标飞行。适配了Ego-Planner-Swarm开源软件,作为多机协同下的避障导航软件。它结合了多机的位置,和各自目标下的轨迹,整体规划出防碰撞轨迹。再结合控制软件就可以同步控制集群进行目标飞行。在分布式多机协同系统中,需要互通网络环境和多机通讯机制。目前引用的Ego-Planner-Swarm软件是基于ROS系统的多机通讯机制,是Master/Slave架构的消息通讯机制。Visbot视觉模块提供了Wifi接口,可接入大功率Wi-Fi基站,优势是可以较长距离通讯;也可以配置成自组网模式,省去Wi-Fi基站,可以满足小范围的机群需求。
在视觉版的基础上,RTK版本搭载VisBot 3代视觉模块,双轴增稳云台以及RTK模块,适用于GPS环境下基于视觉/RTK的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。
提供厘米级绝对精度,实时性与稳定性强,算力需求低,适合高处飞行。
