猫头鹰3,实战派。全能旗舰,助力科研成果转化落地,与猫头鹰Mini 3相比,猫头鹰 3体型更大,负载更强,能够搭载更多设备,适用于更多场景。


OWL 3L搭载VisBot 3代视觉模块,双轴增稳云台以及4线LiDAR激光雷达,适用于无GPS环境下基于视觉/LiDAR的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。
激光雷达定位基于LiDAR激光传感器获得的点云数据,融合惯性导航模块的6轴数据,实现LIO算法。
视觉定位基于双目视觉传感器捕获的双目图像,融合惯性导航模块数据,实现VIO算法。
可基于动作捕捉系统定位,支持VRPN协议实时获得定位信息,提供真实飞行数据。
支持基于LiDAR点云/iTof深度图/双目产生深度图,实时生成地图和路径规划的避障算法。
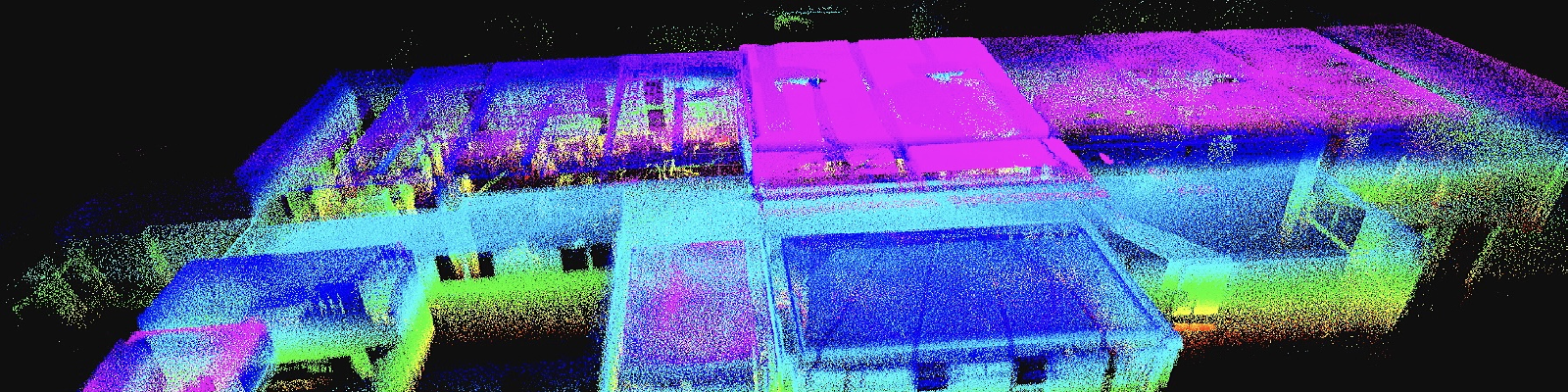
激光雷达通过发射激光束并接收反射光来测量距离,能够提供高精度的距离数据,可精确探测到障碍物的位置、形状和大小等信息,相比单纯的视觉传感器,激光雷达传感器受光照条件、物体表面纹理等因素的影响更小。可以在诸如电磁干扰、强光干扰等复杂的环境中稳定工作,减少因外部干扰而导致的误差,保证无人机对周围环境的准确感知。结合激光雷达获取的大量精确距离数据和OWL3L自身的计算能力,能够快速构建出周围环境的三维模型,为无人机的自主导航、路径规划以及避障提供更全面、准确的信息基础,使其能更好地适应复杂多变的环境。
